(nguồn)
Synthesis and Evaluation of the Service Limit State of Engineered Fills for Bridge Support
Tổng hợp và đánh giá trạng thái giới hạn sử dụng của các lớp đất đắp làm móng cầu
link
Trong chương này, các phương pháp đang được chấp nhận rộng rãi và sử dụng thường xuyên để tính toán độ lún tức thời và dài hạn của móng nông của cầu, độ biến dạng đứng của mố GRS, và chuyển vị ngang của mố GRS được đánh giá. Các phương pháp hiện có để tính toán biến dạng dài hạn của móng nông trên đất hạt cũng được trình bày.
4.1 Các phương pháp tính độ lún tức thời của móng cầu trên đất hạt rời
Có nhiều phương pháp để tính độ lún tức thời (đàn hồi) của móng nông. Das đã thực hiện một tổng quan phê bình 12 phương pháp phổ biến về tính lún đàn hồi của móng nông trên đất hạt.(91) Ông nhóm các phương pháp này thành ba nhóm:
- các phương pháp dựa trên quan trắc độ lún của các kết cấu thực và mô hình toàn phần,
- các phương pháp bán kinh nghiệm dựa trên kết hợp giữa quan trắc hiện trường và mô hình lý thuyết,
- và các phương pháp dựa trên các quan hệ lý thuyết rút ra từ lý thuyết đàn hồi.
Trong mục này, năm phương pháp sau được trình bày và đánh giá:
- Phương pháp Schmertmann cải tiến.(92,93)
- Phương pháp Hough.(94)
- Phương pháp Peck và Bazaraa.(95)
- Phương pháp Burland và Burbidge.(96)
- Phương pháp D’Appolonia.(97,98)
Năm phương pháp này đã được đánh giá trong các nghiên cứu trước đây của FHWA và một nghiên cứu SHRP2.(3,12,10) AASHTO LRFD Bridge Design Specifications khuyến nghị sử dụng phương pháp Hough vì nó cho hệ số biến thiên nhỏ nhất.(8,94) Tuy nhiên, phương pháp Hough cho kết quả bảo toàn khoảng 2 lần, nên thường dẫn đến việc phải dùng móng sâu thay vì spread footing để thỏa các tiêu chí biến dạng cho phép. FHWA khuyến nghị sử dụng phương pháp do Schmertmann đề xuất vì đây là phương pháp có cơ sở lý thuyết, xét đến không chỉ ứng suất tác dụng mà cả phân bố ảnh hưởng ứng suất–biến dạng theo chiều sâu đối với các dạng móng khác nhau, đồng thời xét cả tính đàn hồi của các lớp đất nền, kể cả khi chúng phân lớp.(6,7,92,93,10)
Phương pháp Schmertmann cải tiến
Để ước tính độ lún của móng trong lớp đắp kết cấu (structural fill) theo phương pháp Schmertmann, cần phải giả thiết về số búa thí nghiệm xuyên tiêu chuẩn (SPT) tương ứng với quãng xuyên 6 inch thứ hai và thứ ba vào lớp đất nền (giá trị N) sao cho đại diện được cho lớp engineered fill.(92,93) Báo cáo của FHWA Spread Footings for Highway Bridges sử dụng giá trị N của SPT bằng 32 búa/ft (32 búa/0.305 m), đã hiệu chỉnh theo ứng suất do đất phủ (overburden pressure), như một giá trị đại diện để ước tính độ lún trong các lớp structural fill.(3) Giá trị N của SPT này tương ứng với độ chặt tương đối xấp xỉ 85 % tại ứng suất phủ khoảng 2 000 psf (95.8 kPa) và khoảng 97 % RC theo Proctor cải tiến.(3,18)
Trong các điều kiện đầm chặt như vậy, và khi không có số liệu SPT khác trong lớp structural fill, độ lún của một móng đặt trên lớp structural fill có thể được ước tính bằng cách giả định số búa SPT đã hiệu chỉnh (\((N_1)\)₆₀) bằng 32. Tuy nhiên, các lớp engineered fill thường được đầm đến RC bằng 95 % Proctor cải tiến. Với trường hợp này, giá trị \((N_1)\)₆₀ bằng 23 là phù hợp hơn.(18)
Dựa trên phương pháp Schmertmann cải tiến, độ lún tức thời của spread footing có thể được ước lượng bằng các biểu thức trong Hình 55 đến Hình 57.(93)
\[
S_i = C_1 C_2 \Delta p \sum_{i=1}^{n} \left[ H_i \left( \frac{I_z}{X E_i} \right) \right]
\]
Hình 55. Phương trình. Độ lún tức thời của móng bè theo phương pháp Schmertmann cải tiến.
trong đó:
- \(S_i\) = Độ lún tức thời.
- \(C_1\) = Hệ số hiệu chỉnh xét đến giảm biến dạng do đào đất để chôn móng, được định nghĩa trong Hình 56.
- \(C_2\) = Hệ số hiệu chỉnh xét đến creep, tức là sự tăng lún theo thời gian trong (t) năm sau khi xây dựng, được định nghĩa trong Hình 57.
- \(\Delta p\) = Ứng suất dư thuần tác dụng tại cao độ đáy móng.
- \(H_i\) = Bề dày của mỗi lớp đất.
- \(I_z\) = Hệ số ảnh hưởng biến dạng theo chiều sâu.
- \(X\) = Hệ số dùng để xác định mô đun đàn hồi.
- \(E_i\) = Mô đun đàn hồi của lớp đất thứ (i) theo phương đứng.
\[
C_1 = 1 – 0.5\left(\frac{p_o}{\Delta p}\right) \ge 0.5
\]
Hình 56. Phương trình. Hệ số hiệu chỉnh xét đến độ sâu chôn móng.
Trong đó \(p_o\) = ứng suất hữu hiệu ban đầu tại cao độ đáy móng.
\[
C_2 = 1 + 0.2 \log_{10}\left(\frac{t(\text{years})}{0.1}\right)
\]
Hình 57. Phương trình. Hệ số hiệu chỉnh xét đến creep.
Phương pháp Hough
Phương pháp Hough nguyên bản được sử dụng để ước tính độ lún tức thời của nền đắp.(84) Phương pháp này dựa trên các giá trị SPT N chưa hiệu chỉnh và bao gồm các khuyến nghị tương ứng cho đất không dính cũng như đất dính như sét pha cát và sét nhào trộn lại. AASHTO đã sửa đổi phương pháp Hough và sử dụng \((N_1)_{60}\) để loại bỏ các khuyến nghị đối với sét pha cát và sét nhào trộn lại.(9,84) Tuy nhiên, độ lún được ước tính theo phương pháp Hough đã hiệu chỉnh thường bị đánh giá lớn hơn thực tế với hệ số từ 2 lần trở lên, theo dữ liệu trong báo cáo FHWA Spread Footings for Highway Bridges.(3) Những ước tính bảo thủ như vậy có thể là quá mức xét theo ứng xử của các công trình đặt trong, dưới, hoặc gần nền đắp. Trong những trường hợp mà công trình bị ảnh hưởng bởi độ lún của nền đắp, cần sử dụng các ước tính tinh hơn đối với độ lún tức thời.
Trong phương pháp Hough, độ lún tức thời của cát dưới móng nông được tính bằng cách lấy tổng độ lún của các lớp đất con dày 10 ft (3.05 m) nằm trong phạm vi chịu tải của móng. Độ lún \((\Delta H)\) của mỗi lớp đất được tính theo công thức sau:
\begin{aligned}
\Delta H = H_i \left(\dfrac{1}{C_i}\right)
\log_{10}\left(\dfrac{\sigma’_o + \Delta\sigma’_v}{\sigma’_o}\right)
\end{aligned}
Hình 58. Phương trình. Độ lún tức thời của mỗi lớp đất dựa trên phương pháp Hough.
Trong đó:
- \(C\) = Chỉ số sức chịu tải (Bearing Capacity Index).
- \(\sigma’_o\) = Ứng suất hữu hiệu trung bình ban đầu của lớp đất con đã chia.
- \(\Delta\sigma’_v\) = Gia tăng ứng suất đứng trong lớp đất con do tải trọng móng gây ra.
Phương pháp Peck và Bazaraa
Phương pháp Peck và Bazaraa được xây dựng dựa trên phương trình thực nghiệm gốc của Terzaghi và Peck. Số búa SPT được hiệu chỉnh theo ứng suất thẳng đứng do đất phủ (overburden pressure) để phản ánh đúng độ chặt tương đối của đất. Độ lún tức thời của móng trên cát được tính như sau:
\begin{aligned}
S= C_w C_D\ \dfrac{2p}{(N_1)_{60}} \left(\dfrac{B}{B + 0.3}\right)^2
\end{aligned}
Hình 59. Phương trình. Độ lún tức thời của móng theo phương pháp Peck và Bazaraa.
trong đó:
- \(S\) = Độ lún của móng.
- \(C_w\) = Hệ số hiệu chỉnh mực nước ngầm tại cao độ cách đáy móng một khoảng bằng (B/2).
- \(C_D\) = Hệ số hiệu chỉnh chiều chôn móng.
- \(p\) = Áp lực tiếp xúc dưới đáy móng.
Giá trị \((N_1)_{60}\) có thể được ước tính bằng các phương trình ở Hình 60 và Hình 61 như sau:
\begin{aligned}
(N_1)_{60} = \frac{4 N_{60}}{1 + 0.04\,\sigma’_o} \quad \text{(khi } \sigma’_o \le 1.566~\text{lb/ft}^2~(75~\text{kN/m}^2) \text{)}
\end{aligned}
Hình 60. Phương trình. Số búa SPT đã hiệu chỉnh cho ứng suất đất phủ nhỏ hơn hoặc bằng 1.566 lb/ft² (75 kPa).
Trong đó \(N_{60}\) = Chỉ số xuyên tiêu chuẩn đã hiệu chỉnh theo điều kiện hiện trường.
$$(N_1)_{60} = \frac{4 N_{60}}{3.25 + 0.01\,\sigma’_o} \quad \text{(khi } \sigma’_o > 1.566~\text{lb/ft}^2~(75~\text{kN/m}^2) \text{)}$$
Hình 61. Phương trình. Số búa SPT đã hiệu chỉnh cho ứng suất đất phủ lớn hơn 1.566 lb/ft² (75 kPa).
Phương pháp Burland và Burbidge
Phương pháp Burland và Burbidge là một quan hệ thực nghiệm giữa số búa SPT trung bình, bề rộng móng và độ nén lún của nền đất dưới móng.(96) Nó dựa trên phân tích hồi quy của các loạt thí nghiệm điển hình. Độ lún tức thời của móng trên đất hạt được cho bởi:
\[
S = f_s f_\ell f_t \Bigl[\bigl(q’ – \tfrac{2}{3}\sigma’_0\bigr) B^{0.7}\Bigr] I_c
\]
Hình 62. Phương trình. Độ lún tức thời của móng theo phương pháp Burland và Burbidge.
trong đó:
- \(f_s\) = hệ số hiệu chỉnh hình dạng.
- \(f_i\) = hệ số hiệu chỉnh cho bề dày lớp cát hoặc sỏi.
- \(f_t\) = hệ số thời gian, dùng khi \(t \ge 3\) năm.
- \(q’\) = áp lực tổng (gross) tác dụng trung bình.
- \(I_c\) = chỉ số nén lún (Compressibility Index).
Phương pháp D’Appolonia
Phương pháp D’Appolonia dựa trên lý thuyết đàn hồi. (97,98) Độ lún tức thời của móng trên cát được cho bởi:
\[
S = \frac{p B}{M \mu_0 \mu_1}
\]
Hình 63. Phương trình. Độ lún tức thời của móng theo phương pháp D’Appolonia.
Trong đó:
- \(M\) = mô đun nén lún của cát; được xác định bằng biểu đồ thực nghiệm dựa trên kết quả SPT cho cả cát normally và quá cố kết; số búa SPT trung bình trong lớp đất là tại độ sâu B bên dưới cao trình đáy móng.(97)
- \(\mu_0\) = hệ số hiệu chỉnh chiều sâu chôn móng, dùng biểu đồ của Christian và Carrier.(100)
- \(\mu_1\) = hệ số hiệu chỉnh cho bề dày lớp cát, dùng biểu đồ của Christian và Carrier.(100)
4.2 Độ lún lâu dài của móng nông trên đất hạt rời
Độ lún lâu dài, hay phụ thuộc thời gian, của móng nông trên đất hạt rời còn được gọi là “creep” hay “độ lún thứ cấp”. Crouse và Wu đã thực hiện một nghiên cứu để xem xét khả năng làm việc lâu dài (lớn hơn 6 tháng) của bảy tường GRS quy mô thực ở Hoa Kỳ và Canada.(101) Chiều cao tường từ 15 đến hơn 40 ft (4.6 đến hơn 12.2 m) và thường chịu thêm tải surcharge từ khối đắp đất hoặc tải trọng tuyến đường. Vật liệu địa kỹ thuật sử dụng là geogrid hoặc geotextile, và mặt tường là các khối bê tông dạng môđun, tấm panel, hoặc bề mặt bê tông lộ thiên. Tốc độ creep của cốt gia cường thay đổi từ 0,4 đến 0,7 phần trăm, với một tường GRS có tốc độ 1,5 phần trăm. Mặc dù tốc độ creep của các tường GRS không được báo cáo định lượng, người ta nhận thấy rằng tốc độ creep giảm dần theo thời gian với tốc độ giảm cũng nhỏ dần.(102) Adams và Nicks đã thực hiện một nghiên cứu quy mô thực về độ lún thứ cấp của bốn trụ GRS.(27) Kết quả cho thấy độ lún thứ cấp thực sự xảy ra trong vật liệu hạt rời, nhưng với GRS thì giá trị này vẫn nằm trong giới hạn cho phép điển hình đối với cầu.
Các công thức thực nghiệm đã được các nhà nghiên cứu trước đây đề xuất để đánh giá độ lún lâu dài của đất hạt rời do creep. Phần này trình bày bốn phương pháp. Do dữ liệu về độ lún lâu dài của móng nông trên đất hạt rời còn hạn chế, nên chưa tiến hành đánh giá các phương pháp này.
Phương pháp Schmertmann hiệu chỉnh xem creep là phần gia tăng độ lún phụ thuộc thời gian sau khi thi công, như thể hiện trong Hình 57.(92,93)
Terzaghi, Peck và Mesri đã đưa ra phương trình sau để tính độ lún do creep \((S_\text{creep})\).(103)
\[
S_{\text{creep}} = \left(\frac{0.1}{\bar{q}_c}\right) z_0 \log\left(\frac{t_\text{ days}}{1_\text{ day}}\right)
\]
Hình 64. Phương trình. Độ lún do creep.
trong đó:
\(\bar{q}_c\) = giá trị trung bình có trọng số của sức kháng tĩnh mũi đo được trong thí nghiệm xuyên tĩnh \(q_c\) trong khoảng từ z = 0 đến z_0, với z là chiều sâu tính từ mặt đất tự nhiên và \(z_0\) là chiều sâu đang xét.
Wu xây dựng phương trình tốc độ creep tiếp theo bằng cách giả thiết quan hệ tuyến tính giữa thang log của tốc độ creep và thang log của thời gian.(102)
\[
\frac{d\varepsilon_c}{dt} = A(t)^m
\]
Hình 65. Phương trình. Tốc độ creep của móng nông.
trong đó:
- \(\varepsilon_c\) = Biến dạng creep (phần trăm).
- \(A\) = Tốc độ creep tham chiếu; (\(d\varepsilon_c/dt\)) tại (t = 1) ngày (phần trăm/ngày).
- \(m\) = Mô đun creep (bằng hệ số góc của đường thẳng \(\log(d\varepsilon_c/dt)\) theo \(\log(t)\); có thể xác định từ các thí nghiệm PT).
Briaud và Garland và Briaud đã đề xuất một biểu thức mô tả độ lún phụ thuộc thời gian của móng trên cát như sau:(104,105)
\[
\frac{s(t)}{s(t_1)} = \left(\frac{t}{t_1}\right)^n
\]
Hình 66. Phương trình. Độ lún phụ thuộc thời gian của móng trên cát.
trong đó:
- \(s(t)\) = Độ lún tại thời điểm (t).
- \(s(t_1)\) = Độ lún tại thời điểm \(t_1\), với \(t_1\) là thời gian tham chiếu (1 phút).
- \(n\) = Số mũ phụ thuộc thời gian.
Briaud cho biết mô hình nêu trong Hình 66 phù hợp tốt với thí nghiệm móng quy mô lớn và giá trị n đối với cát thường biến thiên từ 0.005 đến 0.03.(105,106) Briaud khuyến nghị xác định giá trị \(n\) đặc trưng cho từng hiện trường bằng thí nghiệm creep pressuremeter.(105) Nếu không có, việc dùng giá trị (n = 0.03) được xem là an toàn cho cát trong đa số trường hợp.
4.3 Biến dạng thẳng đứng của mố GRS
Cách xác định biến dạng thẳng đứng của một mố GRS là dựa trên thực nghiệm bằng cách tìm biến dạng từ một đường cong PT phù hợp.(32) Biến dạng thẳng đứng của mố GRS được xác định tại giao điểm giữa ứng suất thẳng đứng tác dụng do tĩnh tải và bao đường thiết kế PT cho biến dạng thẳng đứng. Biến dạng thẳng đứng nên được giới hạn ở 0,5 % trừ khi cho phép thêm độ lún.(32) Biến dạng ngang sau đó có thể được tính toán bằng phương pháp giải tích, giả thiết mố không thay đổi thể tích.
Chuyển vị thẳng đứng (ρ) của một mố GRS với móng băng được cho bởi phương trình trong Hình 67.(42) Phương trình này dựa trên nghiệm cho chuyển vị tương đối giữa tâm của móng băng và một điểm bất kỳ, với giả thiết độ cứng không đổi theo chiều sâu và hệ số Poisson của vật liệu GRS bằng 0.5.(107)
\[
\rho = \frac{3qb’}{4\pi E_{GRS}}
\Bigg[
\frac{1}{2}\left(1+\frac{a+\dfrac{b’}{2}}{\dfrac{b’}{2}}\right)
\ln\left(\frac{H^{2}+\left(a+\dfrac{b’}{2}\right)^{2}}{\left(\dfrac{b’}{2}\right)^{2}}\right)
+
\frac{1}{2}\left(1-\frac{a+\dfrac{b’}{2}}{\dfrac{b’}{2}}\right)
\ln\left(\frac{H^{2}+a^{2}}{\left(\dfrac{b’}{2}\right)^{2}}\right)
+
\frac{H}{a}\tan^{-1}\left(\frac{a+b’}{H}\right)
+
\frac{H}{a}\tan^{-1}\left(\frac{-b’}{H}\right)
\Bigg]
\]
Hình 67. Phương trình. Chuyển vị thẳng đứng của mố GRS với móng băng.
trong đó:
- π ≈ 3,1415926.
- \(E_{GRS}\) = Mô đun đàn hồi Young của khối GRS.
- q = Áp lực tác dụng.
- a = Khoảng lùi giữa mặt tường và vùng chịu tải.
- b’ = Bề rộng của khối tường mặt.
4.4 Chuyển vị ngang của tường và mố GRS
Phần này trình bày sáu phương pháp tính toán chuyển vị ngang của tường và mố GRS. Lưu ý rằng các phương pháp này chỉ áp dụng cho tường và mố GRS. Tính phù hợp của chúng đối với tường hoặc mố MSE vẫn cần được kiểm chứng.
Đối với biến dạng ngang của tường và mố MSE, tiêu chuẩn FHWA Design and Construction of Mechanically Stabilized Earth Walls and Reinforced Soil Slopes nêu như sau:(37)
“Đối với chuyển vị ngang của tường, hiện chưa có phương pháp nào có thể dự đoán một cách chắc chắn chuyển vị ngang, mà phần lớn xảy ra trong quá trình thi công. Chuyển dịch theo phương ngang phụ thuộc vào ảnh hưởng của việc đầm nén, khả năng giãn dài của lớp cốt, chiều dài cốt, chi tiết liên kết giữa cốt và bản mặt, và chi tiết của hệ mặt tường. Có thể ước tính sơ bộ giá trị chuyển vị ngang có khả năng xảy ra của các kết cấu đơn giản trong giai đoạn thi công dựa trên tỷ số chiều dài cốt với chiều cao tường và khả năng giãn dài của cốt, như thể hiện trong Hình ‘2-15’, phục vụ cho việc kiểm tra trạng thái giới hạn sử dụng.”
(Chương 2, tr. 40)(37)
Phương pháp FHWA
Christopher và các cộng sự đã thiết lập mối quan hệ giữa tỷ số chiều dài cốt và chiều cao tường (L/H) với chuyển vị ngang của tường đất có cốt trong quá trình thi công.(89) Phương pháp này được gọi là “phương pháp FHWA”. Phương pháp FHWA được xây dựng theo kinh nghiệm bằng cách xác định xu thế chuyển vị từ phân tích số và hiệu chỉnh đường cong để phù hợp với số liệu đo ngoài hiện trường. Phương pháp này cho phép ước tính chuyển vị ngang lớn nhất. Trong phương pháp này, một hệ số chuyển vị tương đối được xác định theo thực nghiệm (\(δ_R\)) được biểu diễn đồ thị theo L/H. Dựa trên quan hệ đồ thị đó, một phương trình đa thức bậc bốn được suy ra cho 0.3 < L/H < 1.175 như thể hiện trong Hình 68.(74)
\[
\delta_R = 11.81\left(\frac{L}{H}\right)^4 – 42.25\left(\frac{L}{H}\right)^3 + 57.16\left(\frac{L}{H}\right)^2 – 35.45\left(\frac{L}{H}\right) + 9.471
\]
Hình 68. Phương trình. Hệ số chuyển vị của tường đất có cốt.
Độ biến dạng ngang lớn nhất \((δ_\text{max}\)) của tường GRS được cho bởi:
\[
\delta_{\max} = \frac{\delta_R H}{250}
\]
Hình 69. Phương trình. Độ biến dạng ngang lớn nhất của tường GRS với cốt không giãn (tức cốt kim loại).
\[
\delta_{\max} = \frac{\delta_R H}{75}
\]
Hình 70. Phương trình. Độ biến dạng ngang lớn nhất của tường GRS với cốt giãn (tức cốt địa kỹ thuật).
Wu và các cộng sự cho rằng Hình 70 đã được hiệu chỉnh cho trường hợp tường có chiều cao và tải surcharge khác.(74)
Phương pháp Geoservices
Phương pháp Geoservices dựa trên phân tích cân bằng giới hạn để tính chiều dài cốt cần thiết nhằm thỏa mãn hệ số an toàn kiến nghị đối với ba cơ chế phá hoại ngoài giả định (ví dụ: phá hoại sức chịu tải nền, trượt và lật).(105) Phương pháp này cung cấp một quy trình tính toán chuyển vị ngang của tường. Chuyển vị ngang được tính bằng cách chọn trước một giới hạn biến dạng cho lớp cốt. Giới hạn biến dạng này thường nhỏ hơn 10 % và phụ thuộc vào nhiều yếu tố, như loại kết cấu mặt tường, giới hạn cho phép về chuyển vị và loại vật liệu địa kỹ thuật dùng làm cốt. Các tấm mặt tường bê tông, chẳng hạn, sẽ không cho phép chuyển vị ngang lớn mà không xuất hiện dấu hiệu hư hỏng. Do đó, nên chọn giới hạn biến dạng nhỏ (từ 1 đến 3 %).(74) Sau khi đã chọn giới hạn biến dạng, phương pháp giả thiết một phân bố biến dạng trong lớp cốt để tính toán chuyển dịch tường. Chuyển vị ngang lớn nhất của tường hoặc mố GRS, \(\delta_{h\max}\), được tính như sau:
\[
\delta_{h\max} = \frac{\varepsilon_d L}{2}
\]
Hình 71. Phương trình. Chuyển vị ngang lớn nhất của tường hoặc mố GRS theo phương pháp Geoservices.
trong đó:
\(\varepsilon_d\) = Giới hạn biến dạng.
Phương pháp Colorado Transportation Institute (CTI)
Trong một nghiên cứu cho CTI, Wu đề xuất một phương pháp thiết kế dựa trên tải trọng sử dụng, gọi là phương pháp CTI, để xác định chuyển vị ngang lớn nhất của tường hoặc mố GRS.(109) Trong hầu hết các trường hợp, người thiết kế có thể chọn giới hạn biến dạng thiết kế \((\varepsilon_d)\) từ 1 đến 3 % cho lớp cốt với chiều cao tường (H) nhỏ hơn hoặc bằng 29.52 ft (9 m). \(\delta_{h\max}\) có thể được ước tính bằng công thức thực nghiệm sau trong Hình 72:
\[
\delta_\max = \varepsilon_d \left(\frac{H}{1.25}\right)
\]
Hình 72. Phương trình. Chuyển vị ngang lớn nhất của tường hoặc mố GRS theo phương pháp CTI.
Nếu \(\delta_{\max}\) vượt quá giới hạn chuyển vị cho phép của tường, cần chọn \(\varepsilon_d\) nhỏ hơn để \(\delta_{\max}\) của tường thỏa mãn yêu cầu làm việc. Hình 72 chỉ áp dụng cho các tường có độ cứng mặt tường rất nhỏ, như tường quấn mặt. Các tường có mặt tường cứng đáng kể sẽ có chuyển vị ngang lớn nhất nhỏ hơn. Ví dụ, tường GRS dạng khối xếp môđun có (\delta_{h\max}) nhỏ hơn khoảng 15 % so với giá trị tính theo Hình 72.(74)
Phương pháp Jewell–Milligan
Jewell và Milligan đã đề xuất một phương pháp tính chuyển vị tường dựa trên phân tích ứng suất và chuyển vị trong khối đất có cốt gia cường.(110,111) Phương pháp này chỉ áp dụng cho tường GRS với mặt tường mềm (tức là bỏ qua độ cứng của mặt tường). Jewell và Milligan đã đưa ra các quan hệ đồ thị giữa một hệ số chuyển vị không thứ nguyên
\[
\left(\frac{\delta_h K_{\text{reinf}}}{HP_{\text{base}}}\right)
\]
và độ sâu tính từ đỉnh tường \(\left(\dfrac{Z}{H}\right)\) đối với các loại đất có góc ma sát trong \(\varphi\) và góc giãn nở khác nhau.(111) Trong đó:
- \(\delta_h\) = Chuyển vị ngang của tường hoặc mố GRS với mặt tường mềm.
- \(K_{\text{reinf}}\) = Độ cứng của lớp cốt.
- \(P_{\text{base}}\) = Lực trong cốt tại chân tường.
- \(Z\) = Chiều sâu tính từ đỉnh tường.
(\delta_h) thay đổi theo chiều sâu tường, và (\delta_{h\max}) xảy ra tại khoảng giữa chiều cao H. Dựa trên phương pháp của Jewell và Milligan, Wu và các cộng sự đã suy ra biểu thức giải tích sau cho chuyển vị ngang của tường GRS:(74)
\[
\delta_h = \left(\frac{1}{2}\right)\left(\frac{P_{rm}}{K_{\text{reinf}}}\right)(H – z_i)
\left[\tan\left(45^\circ – \frac{\psi}{2}\right) + \tan\left(90^\circ – \frac{\phi_b}{2}\right)\right]
\]
Hình 73. Phương trình. Chuyển vị ngang của tường hoặc mố GRS với mặt tường mềm.
trong đó:
- \(P_{rm}\) = Lực lớn nhất trong cốt tại độ sâu vùng ảnh hưởng ((z_i)).
- \(K_{\text{reinf}}\) = Độ cứng của lớp cốt.
- \(\phi_{ds}\) = Góc ma sát của đất từ thí nghiệm cắt phẳng trực tiếp.
- \(\psi\) = Góc giãn nở của đất.
Phương pháp Wu
Dựa trên cơ sở lý thuyết của phương pháp Jewell và Milligan, Wu và các cộng sự đã đề xuất một mô hình giải tích để tính chuyển vị ngang của tường GRS với mặt tường dạng khối môđun.(74) Phương pháp này, gọi là “phương pháp Wu”, có xét đến độ cứng của mặt tường. Hình 74 biểu diễn chuyển vị ngang của tường GRS với mặt tường khối môđun, và Hình 75 biểu diễn chuyển vị ngang của tường GRS với mặt tường khối môđun trong trường hợp bỏ qua ảnh hưởng ma sát giữa lưng khối môđun và đất.
\[
\Delta_i = 0.5\left(
\frac{K_h(\gamma_s Z + q) S_v – \gamma_b b’ S_v \tan\delta (1 + \tan\delta \tan\beta)}
{K_{reinf}}
\right)(H – Z)\left[\tan\left(45^\circ – \frac{\psi}{2}\right) + \tan(90^\circ – \varphi_{ds})\right]
\]
Hình 74. Phương trình. Chuyển vị ngang của tường GRS với mặt tường khối môđun.
trong đó:
- \(\Delta_i\) = Chuyển vị ngang của tường GRS với mặt tường khối môđun.
- \(K_h\) = Hệ số áp lực đất theo phương ngang.
- \(\gamma_s\) = Dung trọng của đất.
- \(Z\) = Chiều sâu tính từ đỉnh tường.
- \(\gamma_b\) = Dung trọng của mặt tường khối môđun.
- \(\delta\) = Góc ma sát giữa các phần tử mặt tường khối môđun.
- \(\beta\) = Góc ma sát giữa lưng tường và đất.
Trường hợp bỏ qua ma sát giữa tường và đất:
\[
\Delta_i = 0.5\left(
\frac{K_h(\gamma_s Z + q) S_v – (\gamma_b b’ S_v)\tan\delta}
{K_{reinf}}
\right)(H – Z)\left[\tan\left(45^\circ – \frac{\psi}{2}\right) + \tan(90^\circ – \phi_{ds})\right]
\]
Hình 75. Phương trình. Chuyển vị ngang của tường GRS với mặt tường khối môđun (không xét ma sát giữa tường và đất).
Phương pháp Adams
Adams và các cộng sự đã trình bày một phương pháp tính chuyển vị ngang của mố GRS dưới tác dụng của tải trọng thẳng đứng.(32) Phương pháp này, gọi là “phương pháp Adams”, giả thiết một cách bảo toàn rằng không có sự thay đổi thể tích trong mố GRS, đây là kịch bản bất lợi nhất. Ứng xử tổng hợp của một khối GRS được thi công đúng kỹ thuật là cả cốt và đất cùng biến dạng ngang với cùng một biến dạng. Ứng xử tổng hợp này có thể được dùng để dự đoán cả biến dạng ngang lớn nhất trong cốt và độ biến dạng lớn nhất của mặt tường tại một giá trị tải cho trước. Chuyển vị ngang lớn nhất của mặt mố có thể được ước lượng bằng Hình 76. Sau đó, biến dạng ngang được xác định bằng Hình 77 và nên được giới hạn ở mức 1 phần trăm.(32)
\[
D_L = \frac{2 b_{q, \text{vol}} D_v}{H}
\]
Hình 76. Phương trình. Chuyển vị ngang của mố GRS dưới tác dụng tải trọng thẳng đứng.
trong đó:
- \(D_L\) = Chuyển vị ngang của mố GRS dưới tác dụng tải trọng thẳng đứng.
- \(b_{q,\text{vol}}\) = Bề rộng vùng tải trên đỉnh tường (kể cả phần lùi).
- \(D_v\) = Độ lún thẳng đứng trong mố GRS.
\[
\varepsilon_L = \frac{D_L}{b_{q,\text{vol}}} = \frac{2 D_v}{H} = 2\varepsilon_v
\]
Hình 77. Phương trình. Biến dạng ngang của mố GRS dưới tác dụng tải trọng thẳng đứng.
trong đó:
- \(\varepsilon_L\) = Biến dạng ngang.
- \(\varepsilon_v\) = Biến dạng thẳng đứng tại đỉnh tường.
Lưu ý rằng Hình 76 và Hình 77 dựa trên giả thiết dạng biến dạng ngang hình tam giác và biến dạng thẳng đứng phân bố đều; giả thiết này dựa trên ứng xử biến dạng quan sát được của GRS.(32)
4.5 Đánh giá các phương pháp dự báo biến dạng
Trong mục này, các số liệu thực nghiệm trong tài liệu được áp dụng cho những phương pháp dự báo biến dạng đã trình bày trong chương này để phục vụ đánh giá. Khi đánh giá, độ chệch (ký hiệu là λ), được định nghĩa là tỷ số giữa giá trị đo được và giá trị dự báo, được xem như một biến ngẫu nhiên thống kê. Giá trị λ bằng 1,0 thể hiện trường hợp dự báo trùng với biến dạng đo được (quan trắc).
Giá trị trung bình cộng của λ \((μ_λ)\) được tính như sau:
\[
\mu_\lambda = \frac{\sum \lambda_i}{N_0}
\]
Hình 78. Phương trình. Giá trị trung bình cộng.
Trong đó:
- \(μ_λ\) = Giá trị trung bình cộng của λ.
- \(λ_i\) = Giá trị λ quan trắc (mẫu).
- \(N_0\) = Tổng số (kích thước tổng thể) các giá trị.
Độ lệch chuẩn của λ \((σ_λ)\) được tính như sau:
\[
\sigma_\lambda = \sqrt{\frac{\sum(\lambda_i – \mu_\lambda)^2}{N_0 – 1}}
\]
Hình 79. Phương trình. Độ lệch chuẩn.
Hệ số biến thiên (COV) của λ được tính như sau:
\[
COV = \frac{\sigma}{\mu}
\]
Hình 80. Phương trình. Hệ số biến thiên (COV).
trong đó:
- σ = Độ lệch chuẩn.
- μ = Giá trị trung bình.
Mỗi phương pháp dự báo được đánh giá theo ba tiêu chí sau:
- Tính bảo toàn (Conservativeness): Phương pháp dự báo có λ nhỏ hơn 1.0 được xem là bảo toàn, trong khi phương pháp có λ lớn hơn 1.0 được xem là không bảo toàn.
- Độ chính xác (Accuracy): Độ chính xác của phương pháp dự báo được thể hiện qua độ lệch của giá trị trung bình λ so với 1; giá trị trung bình λ lớn hơn nhiều hoặc nhỏ hơn nhiều so với 1 thể hiện phương pháp dự báo kém chính xác hơn.
- Độ tin cậy (Reliability): Độ tin cậy của phương pháp dự báo được biểu thị bằng COV; giá trị COV lớn thể hiện phương pháp dự báo kém tin cậy.
Độ lún tức thời (Immediate Settlement)
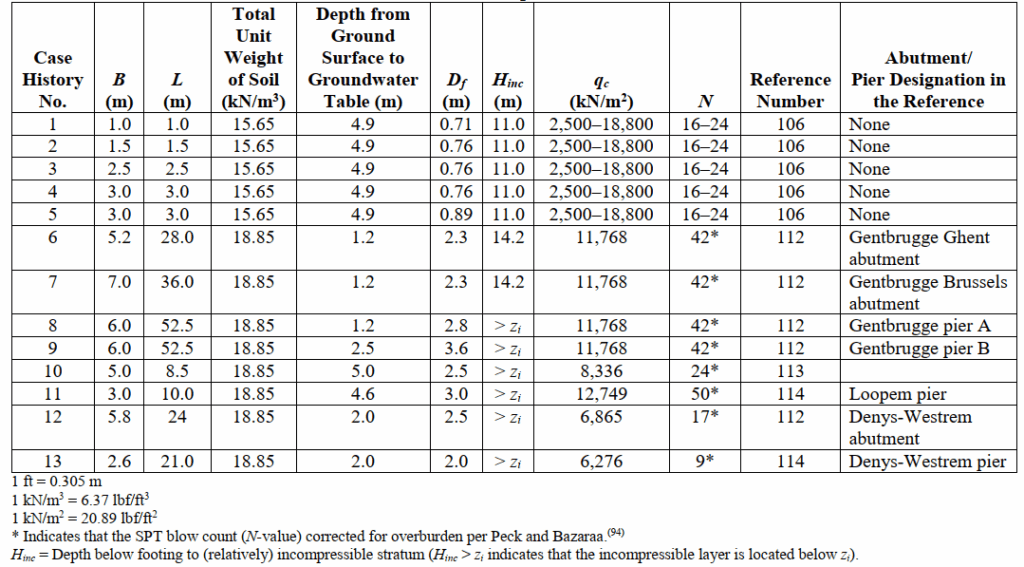
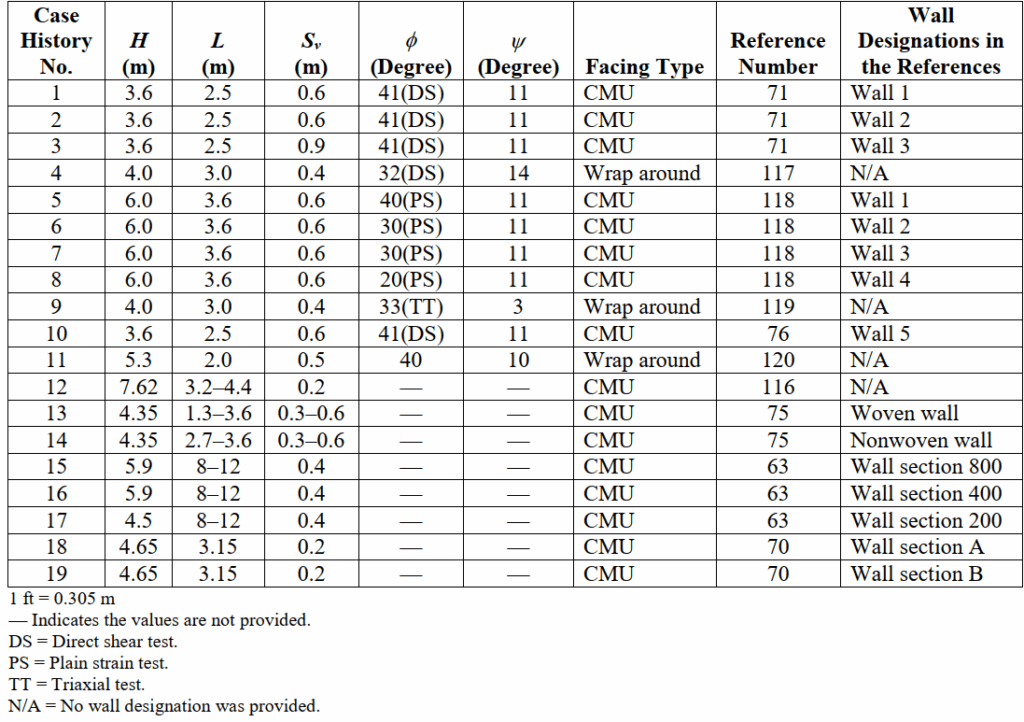
Các quan trắc trong phòng thí nghiệm và hiện trường về độ lún tức thời được dùng để đánh giá năm phương pháp tính độ lún tức thời trình bày trong chương này. Bảng 14 cho thấy các tham số đất nền và móng của các trường hợp điển hình được sử dụng trong quá trình đánh giá.
Bảng 14. Các tham số đất và móng cho các trường hợp điển hình
Phương pháp Schmertmann hiệu chỉnh
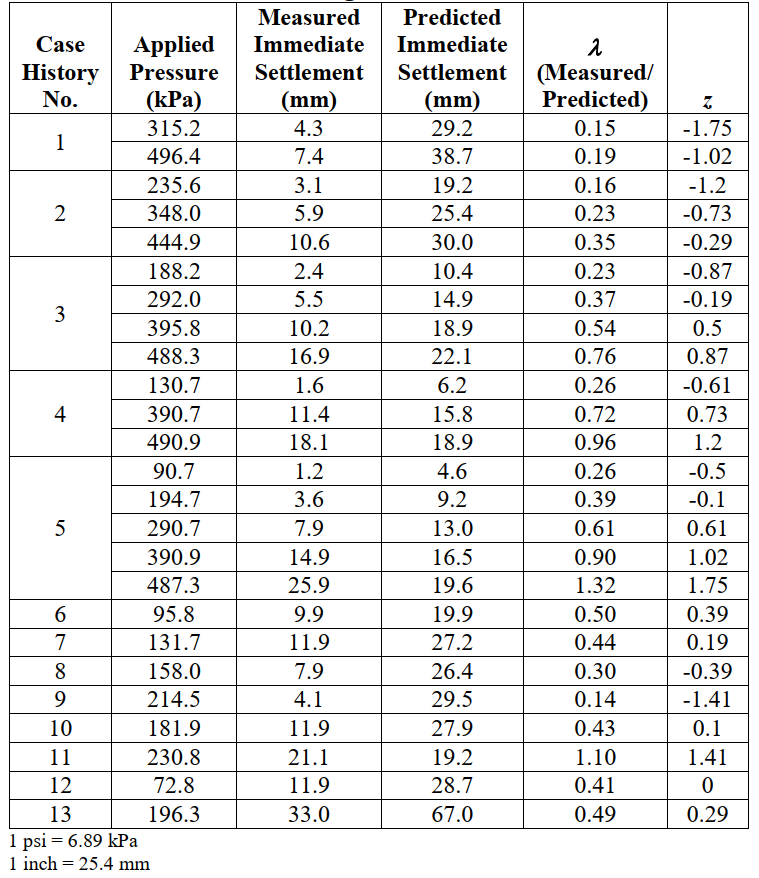
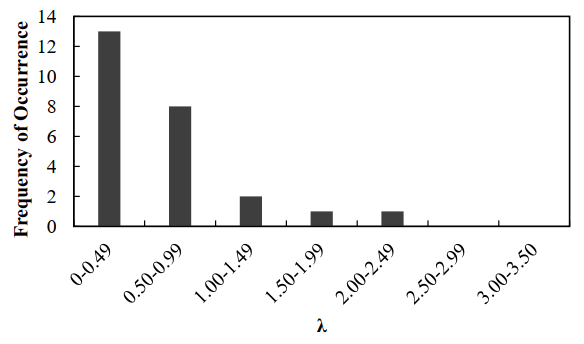
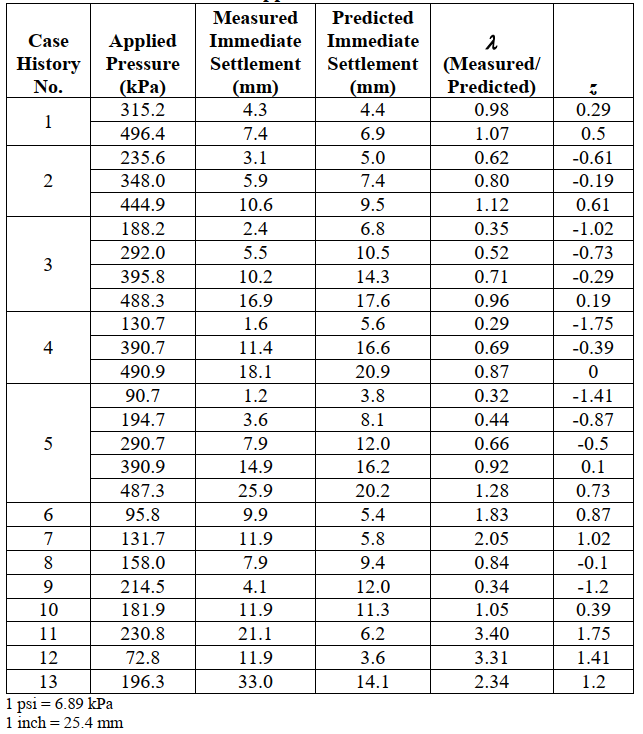
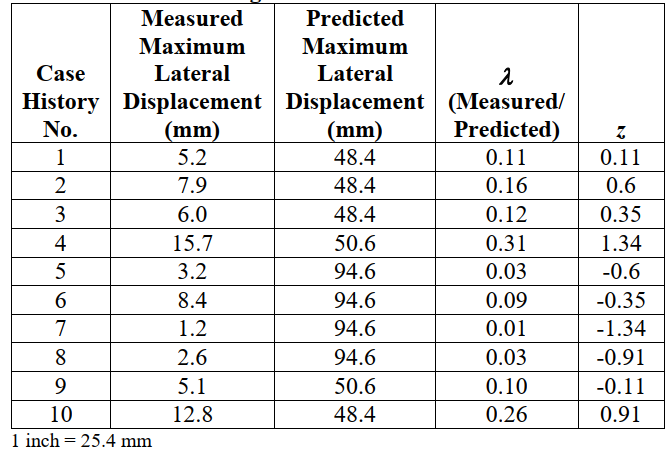
Bảng 15 liệt kê các giá trị dự báo và đo được của độ lún tức thời của móng nông, cùng với λ và biến chuẩn tắc (z) cho từng điểm đo. Dựa trên kết quả, giá trị trung bình λ là 0.49, σ là 0.54 và COV là 1.10.
Bảng 15. Độ lún tức thời dự báo và đo được của móng nông theo phương pháp Schmertmann hiệu chỉnh.
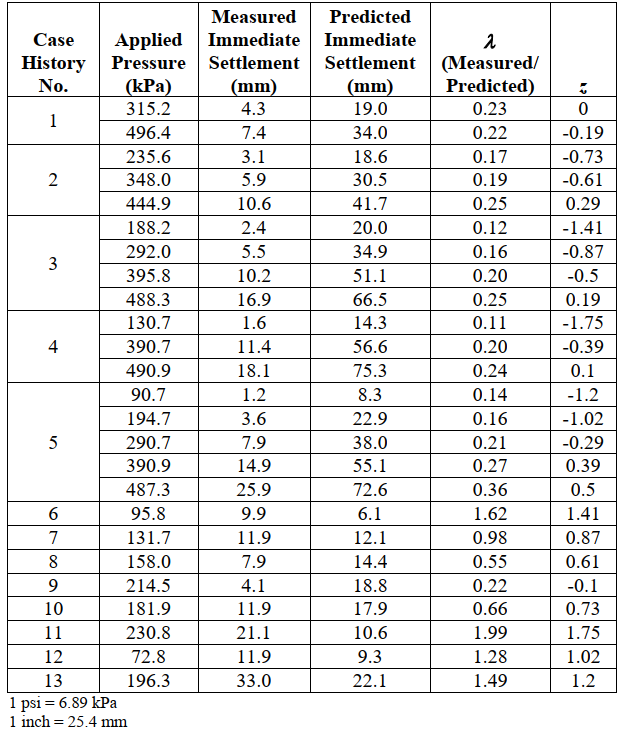
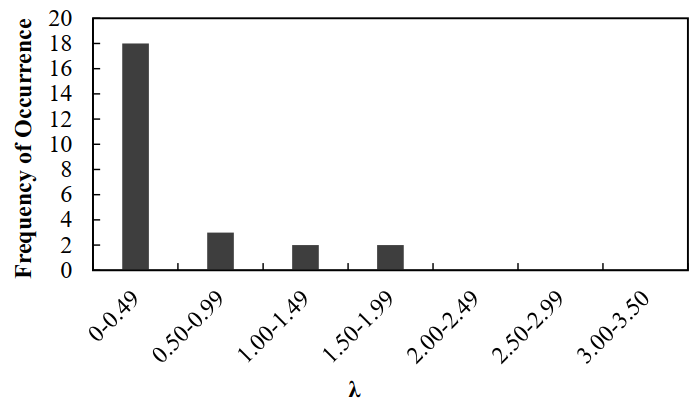
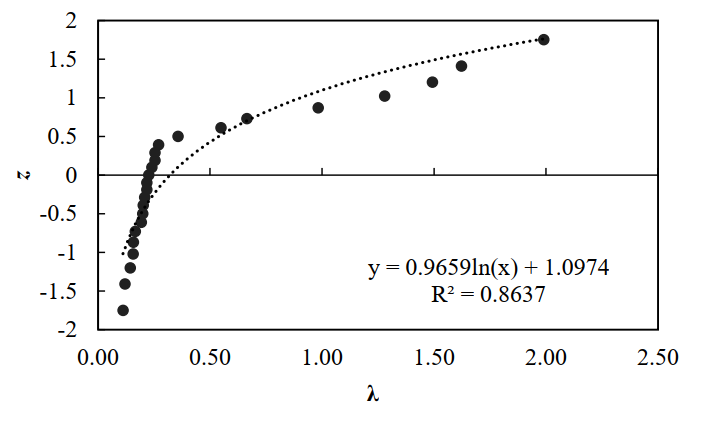
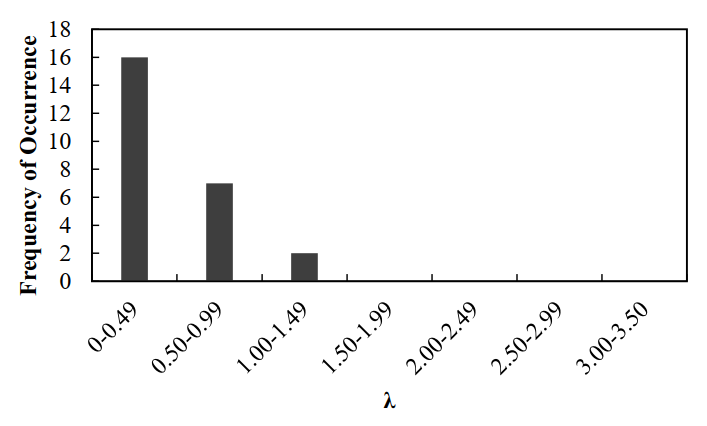
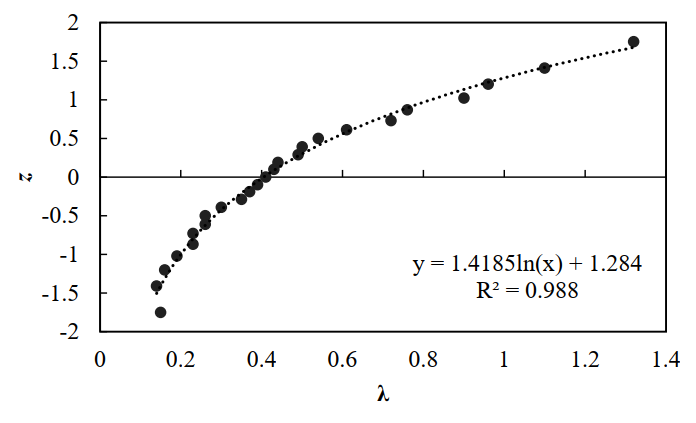
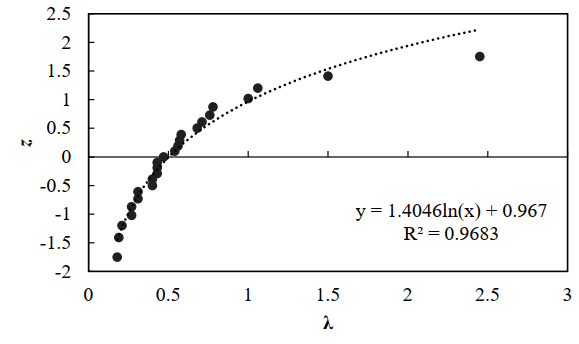
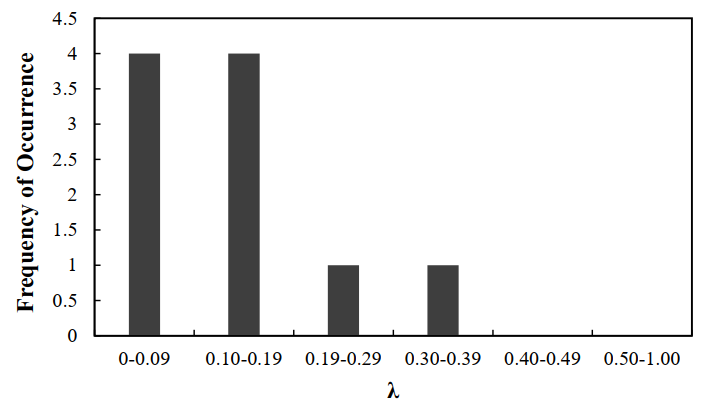
Hình 81 thể hiện biểu đồ phân bố tần suất của λ. Biểu đồ xác suất của λ được trình bày trong Hình 82. Đường cong này tuân theo phân bố lognormal.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này, cần lưu ý rằng số lượng điểm dữ liệu đo được là khá nhỏ về mặt thống kê. Với hạn chế đó, có thể nhận thấy giá trị trung bình λ nhỏ (0.49) của phương pháp Schmertmann hiệu chỉnh cho thấy phương pháp này rất bảo toàn, và phương pháp dự báo đã đánh giá cao độ lún tức thời của móng nông với hệ số 2.04. Giá trị COV tương đối lớn (1.10) cho thấy phương pháp này có độ tin cậy tương đối thấp.
Phương pháp Hough
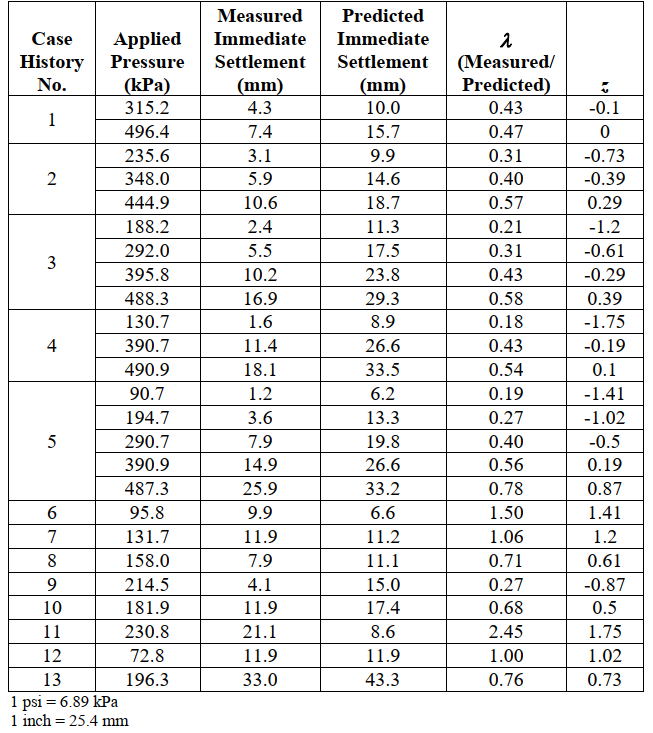
Bảng 16 liệt kê các giá trị dự báo và đo được của độ lún tức thời của móng nông, cũng như λ và z cho từng điểm dữ liệu đo. Dựa trên kết quả, giá trị trung bình λ là 0.9, σ là 0.31 và COV là 0.63.
Bảng 16. Độ lún tức thời dự báo và đo được của móng nông theo phương pháp Hough.
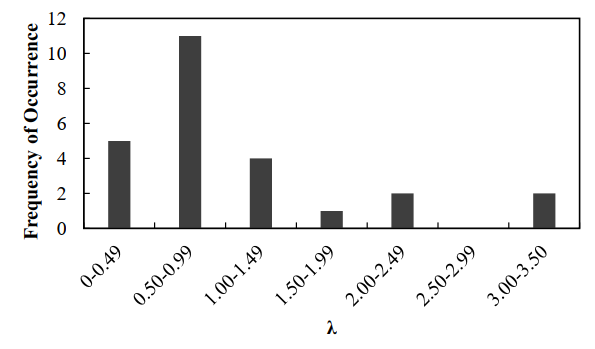
Hình 83 thể hiện biểu đồ phân bố tần suất của λ. Biểu đồ xác suất của λ được trình bày trong Hình 84. Đường cong này tuân theo phân bố lognormal.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này, cần lưu ý rằng số lượng điểm dữ liệu đo được là khá nhỏ về mặt thống kê. Với hạn chế đó, có thể thấy giá trị trung bình λ nhỏ hơn 1 (0.79) cho thấy phương pháp Peck và Bazaraa là một phương pháp dự báo mang tính bảo toàn, và phương pháp dự báo này đã đánh giá cao độ lún của móng nông với hệ số 1.26. Giá trị COV bằng 0.97 cho thấy phương pháp có độ tin cậy tương đối khá.
Burland and Burbidge Method
Bảng 18 liệt kê các giá trị dự báo và đo được của độ lún tức thời của móng nông, cùng với λ và z cho từng điểm dữ liệu đo. Dựa trên kết quả, giá trị trung bình λ là 0.62, σ là 0.49 và COV là 0.79.
Bảng 18. Độ lún tức thời dự báo và đo được của móng nông theo phương pháp Burland và Burbidge.
Hình 87 thể hiện biểu đồ phân bố tần suất của λ. Biểu đồ xác suất của λ được trình bày trong Hình 88. Đường cong này tuân theo phân bố lognormal.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này, cần lưu ý rằng số lượng điểm dữ liệu đo được là khá nhỏ về mặt thống kê. Với hạn chế đó, có thể thấy giá trị trung bình λ nhỏ hơn 1 (0.62) cho thấy phương pháp Burland và Burbidge là một phương pháp dự báo mang tính bảo toàn, và phương pháp dự báo này đã đánh giá cao độ lún của móng nông với hệ số 1.64. Giá trị COV tương đối nhỏ (0.79) cho thấy phương pháp có độ tin cậy tương đối khá.
D’Appolonia Method
Bảng 19 liệt kê các giá trị dự báo và đo được của độ lún tức thời của móng nông, cùng với λ và z cho từng điểm dữ liệu đo. Dựa trên kết quả, giá trị trung bình λ là 1.11, σ là 0.85 và COV là 0.77.
Bảng 19. Độ lún tức thời dự báo và đo được của móng nông theo phương pháp D’Appolonia.
Hình 89 thể hiện biểu đồ phân bố tần suất của λ. Biểu đồ xác suất của λ được trình bày trong Hình 90. Đường cong này tuân theo phân bố lognormal.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này, cần lưu ý rằng số lượng điểm dữ liệu đo được là khá nhỏ về mặt thống kê. Với hạn chế đó, có thể thấy giá trị trung bình λ hơi lớn hơn 1 (1.11) cho thấy phương pháp D’Appolonia là một phương pháp dự báo hơi không bảo toàn, và độ lún tức thời dự báo trung bình bằng khoảng 91 % độ lún thực tế đo được của móng nông. Giá trị COV tương đối nhỏ (0.77) cho thấy phương pháp này có độ tin cậy tương đối khá.
So sánh năm phương pháp dự đoán lún tức thời của móng nông trên đất hạt
Bảng 20 tóm tắt các phân tích thống kê của năm phương pháp dự báo độ lún tức thời của móng nông trên đất hạt rời. Khi diễn giải các kết quả trong nghiên cứu này, cần lưu ý rằng số lượng điểm dữ liệu đo được là khá nhỏ về mặt thống kê. Với hạn chế đó, nhận thấy rằng bốn trong năm phương pháp (Schmertmann hiệu chỉnh, Hough, Peck và Bazaraa, và Burland và Burbidge) có xu hướng đánh giá cao độ lún tức thời, trong khi phương pháp D’Appolonia lại đánh giá hơi thấp độ lún tức thời. So sánh giữa các phương pháp, D’Appolonia là phương pháp chính xác nhất, với giá trị trung bình λ gần bằng 1 nhất và COV tương đối nhỏ, tiếp theo là phương pháp Peck và Bazaraa và phương pháp Burland và Burbidge. Cả phương pháp Schmertmann hiệu chỉnh và phương pháp Hough đều đánh giá cao độ lún tức thời của móng nông trên đất hạt rời với hệ số xấp xỉ 2.
Bảng 20. Tóm tắt các phân tích thống kê của năm phương pháp dự báo độ lún tức thời của móng nông trên đất hạt rời, kết quả từ nghiên cứu này.

Một nghiên cứu tương tự của FHWA do Gifford thực hiện đã đánh giá năm phương pháp trên cơ sở các biến dạng quan trắc được của 34 móng cầu, và kết quả thống kê của họ được liệt kê trong Bảng 21 để so sánh.(3) Với lưu ý rằng bộ dữ liệu có kích thước nhỏ về mặt thống kê, Gifford đã rút ra kết luận sau đây:(3)
“Ba trong năm phương pháp (Burland và Burbidge, D’Appolonia, và Peck và Bazaraa) thường đánh giá thiếu độ lún, trong khi hai phương pháp còn lại (Hough và Schmertmann) thường đánh giá thừa. Phương pháp D’Appolonia là chính xác nhất, xét trung bình, tiếp theo là phương pháp Burland và Burbidge. Phương pháp Hough cho kết quả dự báo kém chính xác nhất.” (tr. 75)(3)
Bảng 21. Tóm tắt các phân tích thống kê của năm phương pháp dự báo độ lún tức thời của móng nông trên đất hạt rời, kết quả từ Gifford.(3)
Biến dạng thẵng đứng của tường và mố GRS
Trong mục này, phương trình thực nghiệm của Adams và các cộng sự dùng để dự báo biến dạng thẳng đứng của tường và mố GRS được đánh giá dựa trên số liệu quan trắc hiện trường.(32) Để tính chuyển vị thẳng đứng của một tường GRS, cần biết mô đun đàn hồi Young tổng hợp của tường GRS \((E_{GRS})\). Phương trình của Holtz và Lee được dùng để tính mô đun đàn hồi Young của vật liệu tổ hợp GRS (xem Hình 91).(115) Khi xây dựng phương trình này cho mô đun đàn hồi Young của vật liệu tổ hợp GRS, giả thiết rằng quan hệ ứng suất–biến dạng của đất và cốt gia cường tuân theo định luật Hooke và biến dạng của vật liệu tổ hợp là đồng nhất.
\[
E_{GRS} = E_R \times \frac{t_R}{S_v} + E_s \times \frac{(S_v – t_R)}{S_v}
\]
Hình 91. Biểu thức. Mô đun đàn hồi của vật liệu tổng hợp GRS.
trong đó:
- \(E_s\) = Mô đun đàn hồi của đất.
- \(t_R\) = Bề dày lớp cốt gia cường.
Vì \(S_v – t_R \approx S_v\) và \(E_R = J/t_R\), trong đó (J) là độ cứng (stiffness) của lớp cốt, nên Hình 91 có thể được đơn giản hóa như sau:
\[
E_{comp} \approx \frac{J}{t_R} \times \frac{t_R}{S_v} + E_s \times \frac{S_v}{S_v}
= \frac{J}{S_v} + E_s
\]
Hình 92. Biểu thức. Mô đun đàn hồi của vật liệu tổng hợp GRS (biểu thức đã hiệu chỉnh).
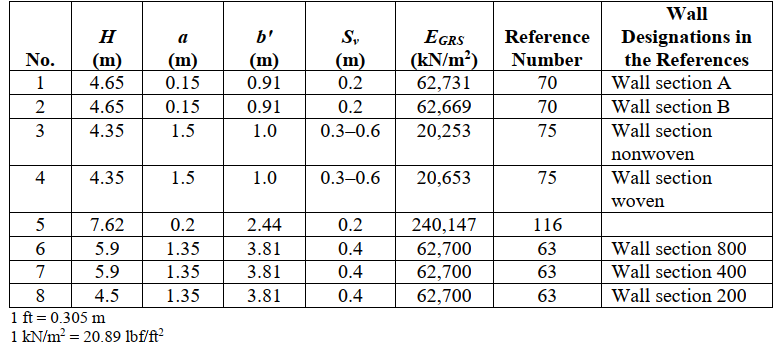
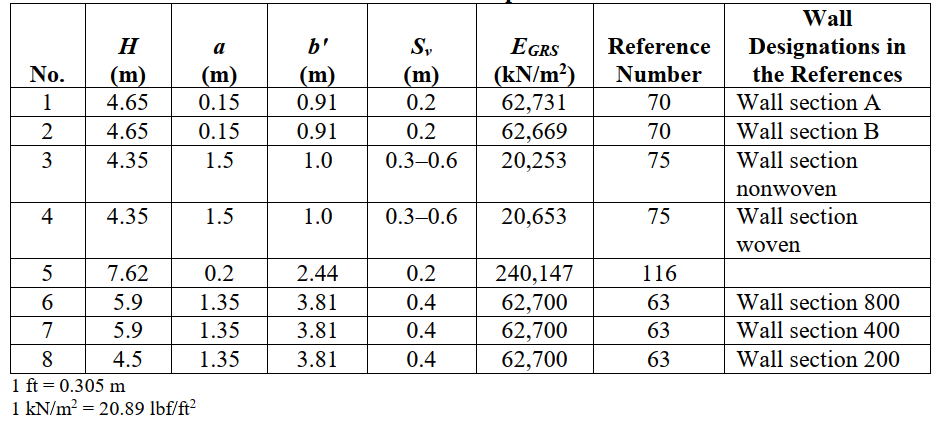
Trong đó \(E_{comp}\) là mô đun đàn hồi của vật liệu tổ hợp GRS. Khi đã biết (q, b’, a, H) và \(E_{GRS}\), có thể tính chuyển vị thẳng đứng bằng Hình 67. Bảng 22 trình bày các tham số được dùng cho việc đánh giá.
Bảng 22. Các thông số mố và tường GRS trong các trường hợp điển hình.
Bảng 23 liệt kê các giá trị dự đoán và đo được của biến dạng thẳng đứng của tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình của λ là 7.31, σ là 5.73 và hệ số biến động COV là 0.78.
Bảng 23. Chuyển vị thẳng đứng dự đoán và đo được của các mố và tường GRS.
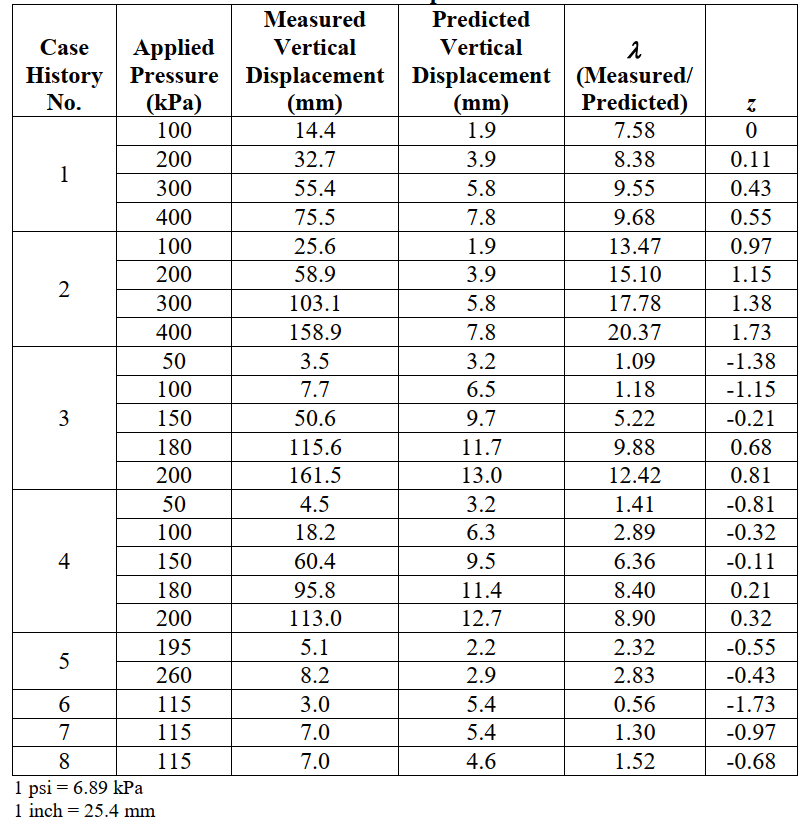
Hình 93 thể hiện biểu đồ phân bố tần suất của λ. Biểu đồ xác suất cho λ được trình bày trong Hình 94. Đường cong tuân theo phân bố lognormal.
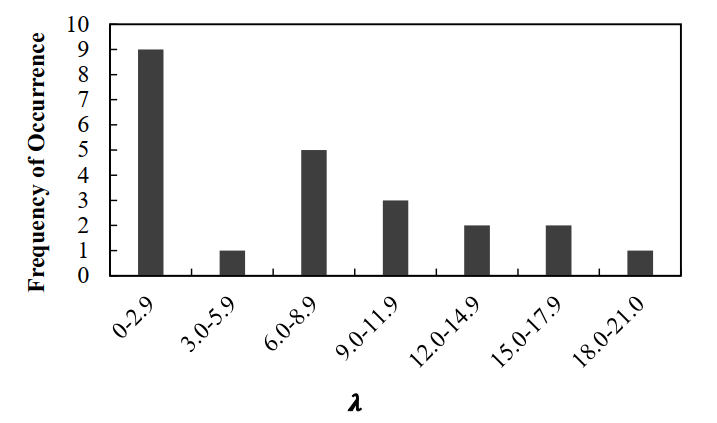
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm số liệu đo được là nhỏ về mặt thống kê. Với hạn chế này, có thể thấy rằng giá trị trung bình λ lớn (7.31) cho thấy phương pháp dự đoán biến dạng thẳng đứng của tường và mố GRS này là không an toàn. Cũng cần lưu ý rằng độ chính xác của phương pháp này bị ảnh hưởng bởi độ chính xác trong việc xác định mô đun đàn hồi Young của vật liệu tổng hợp. Do biểu thức do Holtz và Lee đề xuất (xem Hình 91) gắn với các giả thiết đơn giản hóa, nên độ chính xác của nó cũng phụ thuộc vào việc ước lượng chính xác mô đun Young của lớp gia cường và của đất. Bất kỳ sai số nào trong các ước lượng này đều có thể dẫn đến sai số trong kết quả dự đoán.
Chuyển vị ngang của tường và mố GRS
Trong mục này, các số liệu quan trắc hiện trường về chuyển vị ngang của tường và mố GRS được áp dụng cho sáu phương pháp đã trình bày trước đó để đánh giá mức độ an toàn, độ chính xác và độ tin cậy của chúng. Bảng 24 trình bày các tham số được sử dụng cho việc đánh giá.
Bảng 24. Các thông số mố và tường GRS trong các trường hợp điển hình.
Phương pháp FHWA
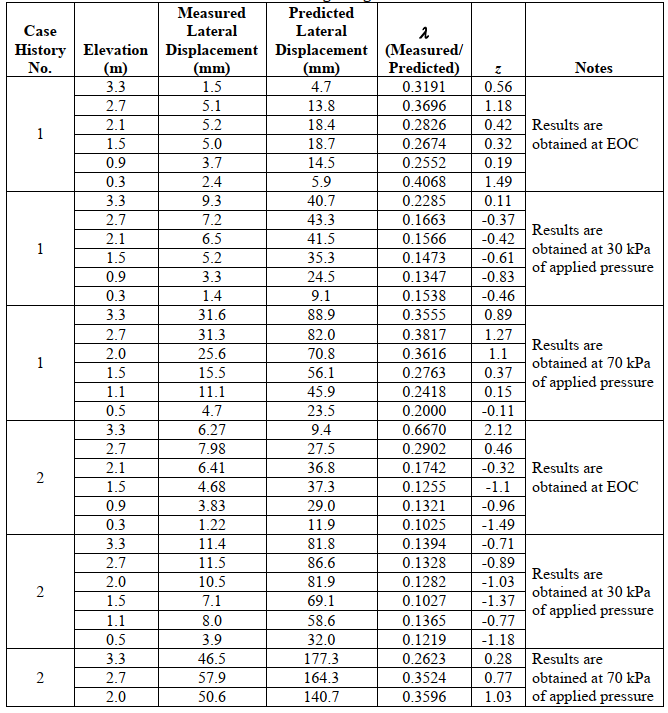
Bảng 25 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang của tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ là 0.12, σ là 0.10 và hệ số biến động COV là 0.83.
Bảng 25. Chuyển vị ngang lớn nhất dự đoán và đo được của các tường GRS tại thời điểm kết thúc thi công (EOC) theo phương pháp FHWA.
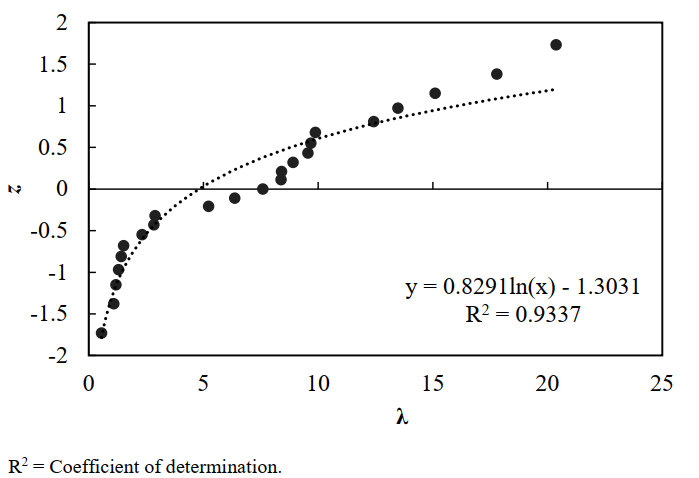
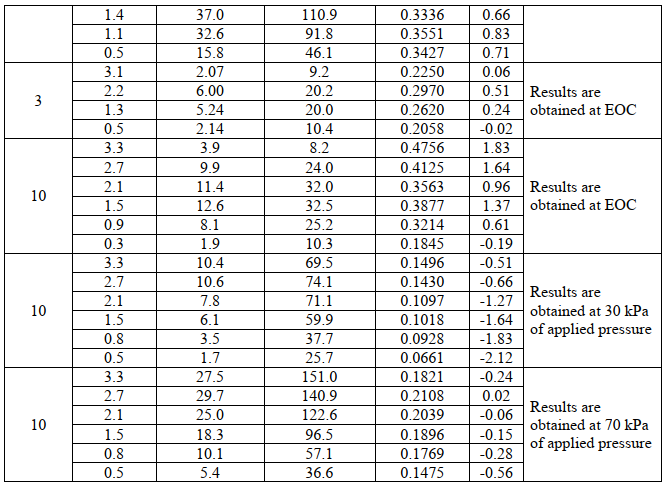
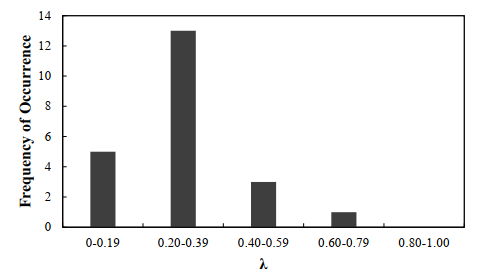
Hình 95 thể hiện biểu đồ phân bố tần suất xuất hiện của λ. Biểu đồ xác suất cho các giá trị λ theo phương pháp FHWA được trình bày trong Hình 96. Đường cong tuân theo phân bố lognormal.
của các tường và mố GRS theo phương pháp FHWA.
dự đoán của các tường GRS theo phương pháp FHWA.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này, cần lưu ý rằng số lượng điểm số liệu đo được là nhỏ về mặt thống kê. Với hạn chế này, có thể thấy rằng giá trị trung bình λ nhỏ hơn 1 (0.12) của phương pháp FHWA cho thấy phương pháp này rất an toàn về phía bảo thủ, và các dự đoán đã đánh giá quá lớn chuyển vị ngang khoảng 8.33 lần. Giá trị COV tương đối thấp (0.83) cho thấy mức độ tin cậy khá của phương pháp này.
Phương pháp Geoservices
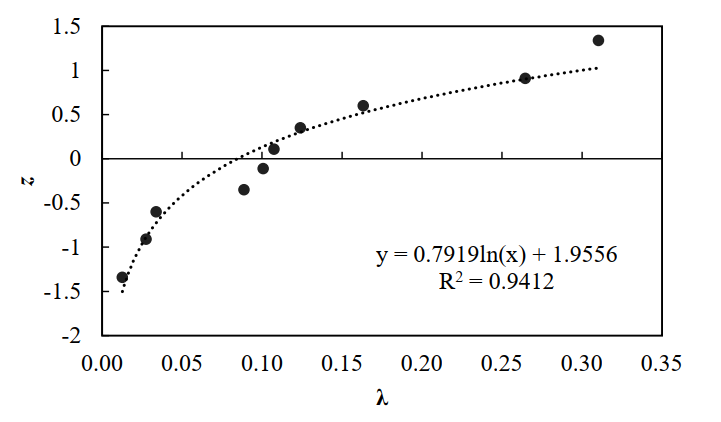
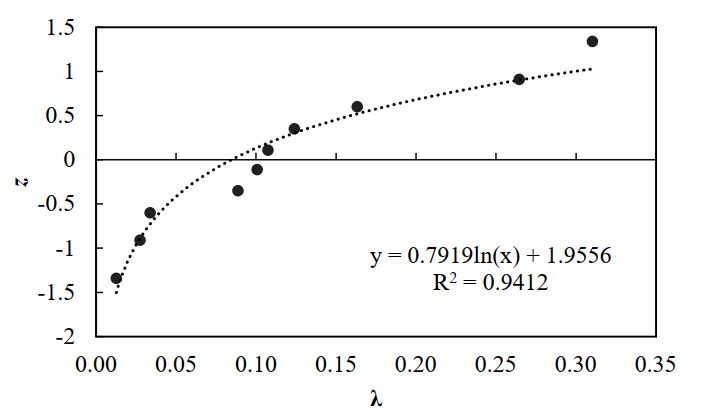
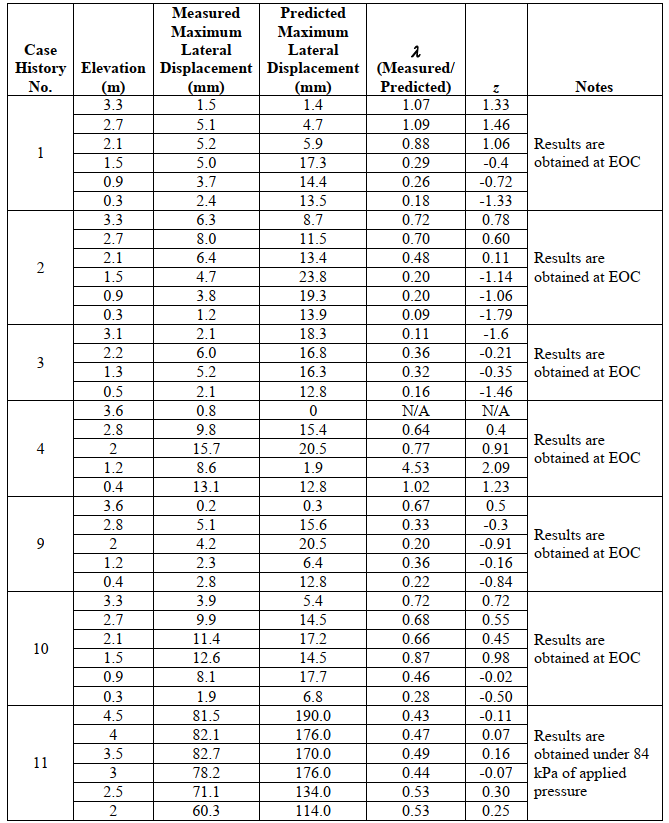
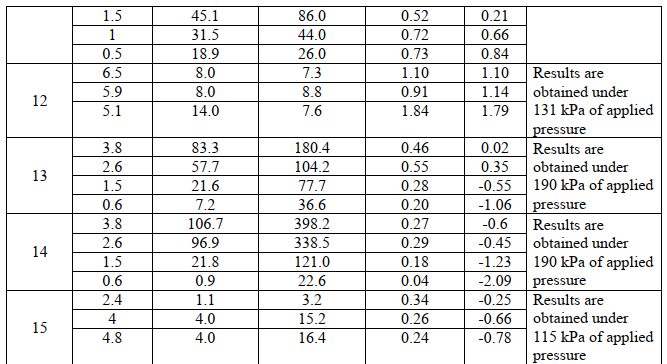
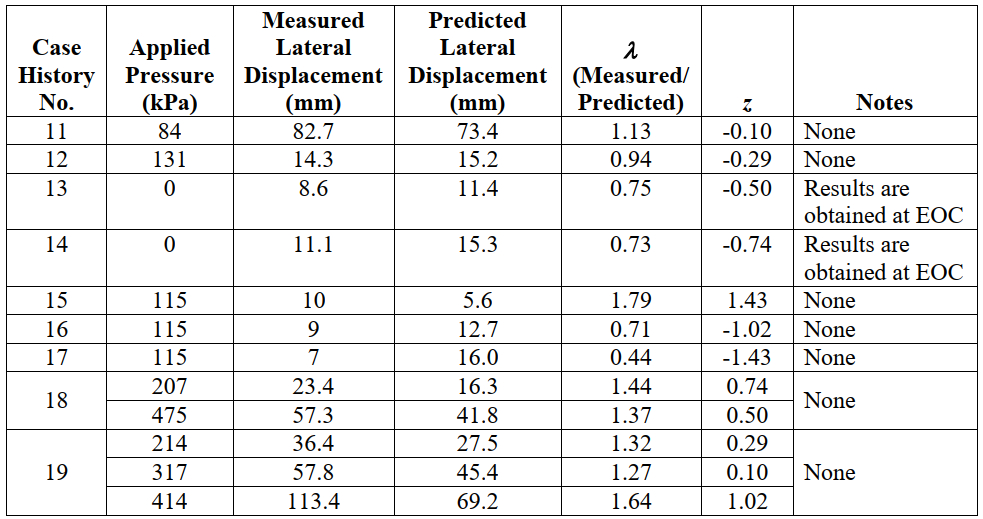
Bảng 26 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang của tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ là 1.38, σ là 1.59 và hệ số biến động COV là 1.15.
Bảng 26. Chuyển vị ngang dự đoán và đo được của các tường và mố GRS theo phương pháp Geoservices.
mố GRS theo phương pháp FHWA.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm dữ liệu đo được là tương đối nhỏ về mặt thống kê.
Với hạn chế này, có thể nhận thấy rằng giá trị trung bình λ nhỏ hơn 1 (0.12) của phương pháp FHWA cho thấy phương pháp này rất bảo thủ, và các giá trị dự đoán đã đánh giá chuyển vị ngang lớn hơn thực tế khoảng 8.33 lần.
Giá trị COV tương đối thấp (0.83) cho thấy độ tin cậy của phương pháp này ở mức chấp nhận được.
Phương pháp Geoservices
Bảng 26 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ bằng 1.38, σ bằng 1.59 và COV bằng 1.15.
| Case History No. | Elevation (m) | Measured Lateral Displacement (mm) | Predicted Lateral Displacement (mm) | λ (Measured / Predicted) | z | Notes |
|---|---|---|---|---|---|---|
| Cao độ (m) | Chuyển vị ngang đo được (mm) | Chuyển vị ngang dự đoán (mm) | Đo được / Dự đoán | Ghi chú | ||
| 1 | 3.3 | 1.5 | 0.7 | 2.11 | 0.84 | Results are |
| 2.7 | 5.1 | 2.4 | 2.12 | 0.98 | obtained at EOC. | |
| 2.1 | 5.2 | 3 | 1.74 | 0.55 | ||
| 1.5 | 5 | 8.9 | 0.56 | -0.35 | ||
| 0.9 | 3.7 | 7.4 | 0.51 | -0.5 | ||
| 0.3 | 2.4 | 6.9 | 0.34 | -1.06 | ||
| 2 | 3.3 | 6.3 | 4.5 | 1.39 | 0.4 | Results are |
| 2.7 | 8 | 5.9 | 1.35 | 0.3 | obtained at EOC. | |
| 2.1 | 6.4 | 6.9 | 0.93 | 0.11 | ||
| 1.5 | 4.7 | 12.3 | 0.38 | -0.98 | ||
| 0.9 | 3.8 | 9.9 | 0.39 | -0.91 | ||
| 0.3 | 1.2 | 7.2 | 0.17 | -1.46 | ||
| 3 | 3.1 | 2.1 | 9.4 | 0.22 | -1.33 | Results are |
| 2.2 | 6 | 8.7 | 0.69 | -0.25 | obtained at EOC. | |
| 1.3 | 5.2 | 8.4 | 0.62 | -0.3 | ||
| 0.5 | 2.1 | 6.6 | 0.32 | -1.14 | ||
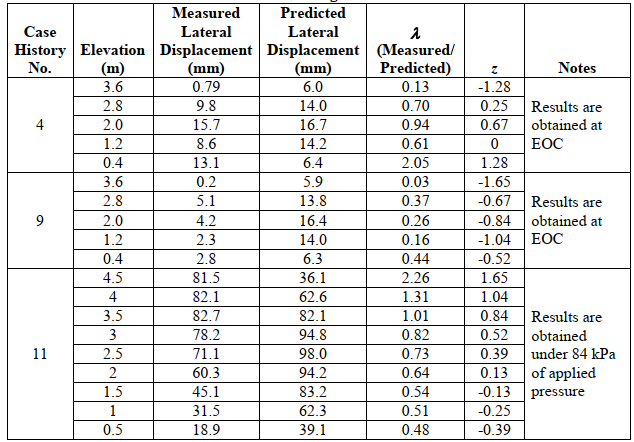
| 4 | 3.6 | 0.8 | 0 | N/A | N/A | Results are |
| 2.8 | 9.8 | 7.2 | 1.36 | 0.35 | obtained at EOC. | |
| 2 | 15.7 | 9.6 | 1.64 | 0.45 | ||
| 1.2 | 8.6 | 0.9 | 9.56 | 2.09 | ||
| 0.4 | 13.1 | 6 | 2.18 | 1.14 | ||
| 9 | 3.6 | 0.2 | 0.2 | 1.33 | 0.25 | Results are |
| 2.8 | 5.1 | 7.3 | 0.67 | -0.21 | obtained at EOC. | |
| 2 | 4.2 | 9.6 | 0.44 | -0.78 | ||
| 1.2 | 2.3 | 3 | 0.76 | 0.02 | ||
| 0.4 | 2.8 | 6 | 0.47 | -0.6 | ||
| 10 | 3.3 | 3.9 | 5 | 0.78 | 0.07 | Results are |
| 2.7 | 9.9 | 13.4 | 0.74 | -0.07 | obtained at EOC. | |
| 2.1 | 11.4 | 15.9 | 0.72 | -0.11 | ||
| 1.5 | 12.6 | 13.4 | 0.94 | 0.16 | ||
| 0.9 | 8.1 | 16.4 | 0.49 | -0.55 | ||
| 0.3 | 1.9 | 6.3 | 0.3 | -1.23 | ||
| 11 | 4.5 | 81.5 | 47.5 | 1.72 | 0.5 | Results are obtained |
| 4 | 82.1 | 44 | 1.87 | 0.66 | under 84 kPa | |
| 3.5 | 82.7 | 42.5 | 1.95 | 0.72 | of applied pressure. | |
| 3 | 78.2 | 44 | 1.78 | 0.6 | ||
| 2.5 | 71.1 | 33.5 | 2.12 | 1.06 | Kết quả dưới áp lực | |
| 2 | 60.3 | 28.5 | 2.12 | 0.91 | tác dụng 84kPa | |
| 1.5 | 45.1 | 21.5 | 2.1 | 0.78 | ||
| 1 | 31.5 | 11 | 2.86 | 1.23 | ||
| 0.5 | 18.9 | 6.5 | 2.91 | 1.33 | ||
| 12 | 6.5 | 8 | 2.1 | 3.81 | 1.6 | Results are obtained |
| 5.9 | 8 | 2.6 | 3.08 | 1.46 | under 131 kPa | |
| 5.1 | 14 | 2.2 | 6.36 | 1.79 | of applied pressure. | |
| 13 | 3.8 | 83.3 | 111.3 | 0.75 | -0.02 | Results are obtained |
| 2.6 | 57.7 | 46.6 | 1.24 | 0.21 | under 190 kPa | |
| 1.3 | 21.6 | 30.2 | 0.71 | -0.16 | of applied pressure. | |
| 0.6 | 7.2 | 15.7 | 0.46 | -0.66 | ||
| 14 | 3.8 | 106.7 | 244.2 | 0.44 | -0.72 | Results are obtained |
| 2.6 | 96.8 | 182.2 | 0.53 | -0.45 | under 190 kPa | |
| 1.5 | 21.8 | 53.6 | 0.41 | -0.84 | of applied pressure. | |
| 0.6 | 0.9 | 8.8 | 0.1 | -1.79 | ||
| 15 | 2.4 | 1.1 | 19.8 | 0.06 | -2.09 | Results are obtained |
| 4 | 4 | 23.8 | 0.17 | -1.6 | under 115 kPa | |
| 4.8 | 4 | 7.4 | 0.54 | -0.4 | of applied pressure. |
1 ft = 0.305 m
1 inch = 25.4 mm
1 psi = 6.89 kPa
N/A = không áp dụng vì giá trị dự đoán bằng không.
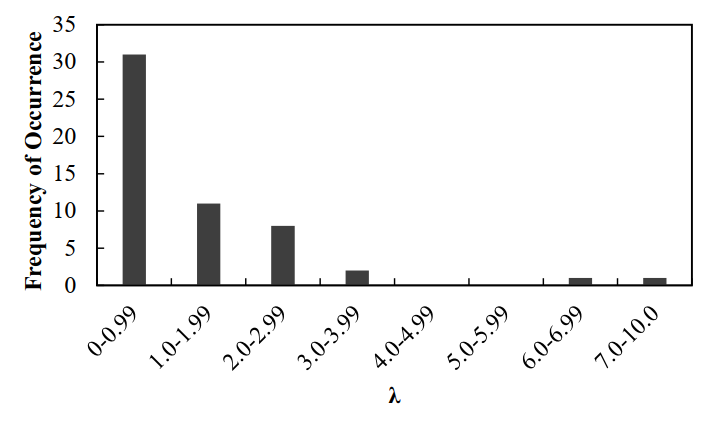
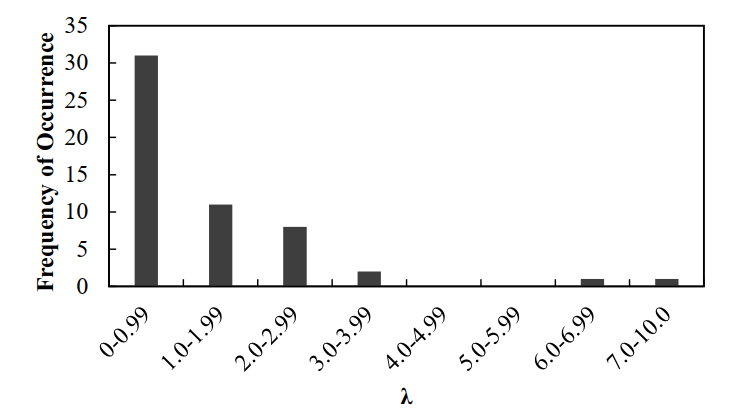
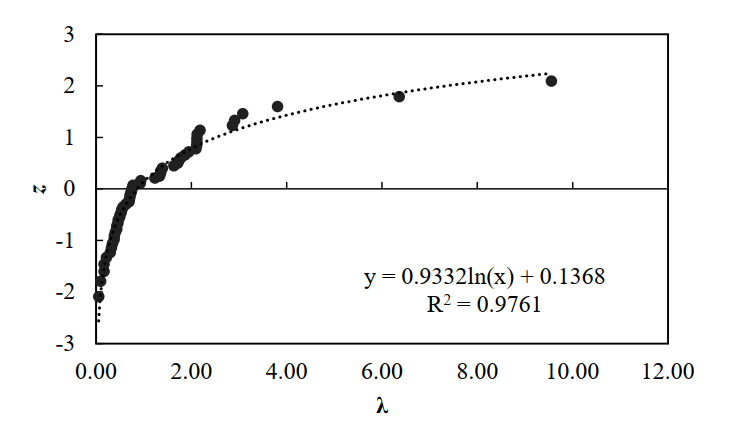
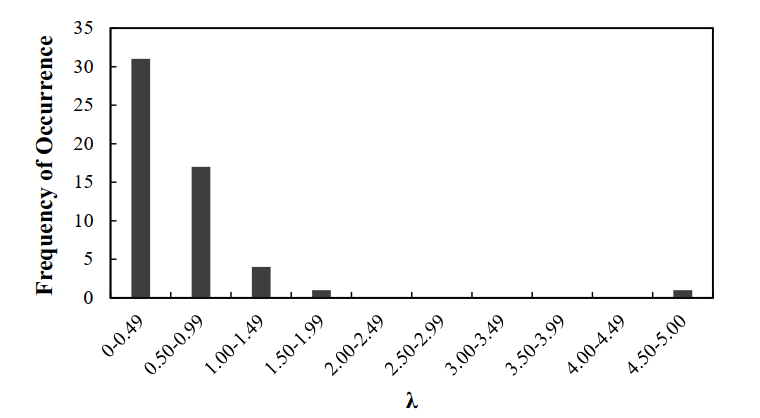
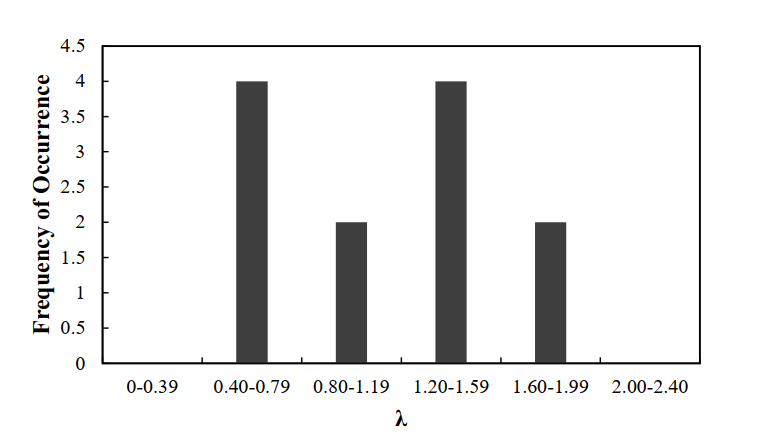
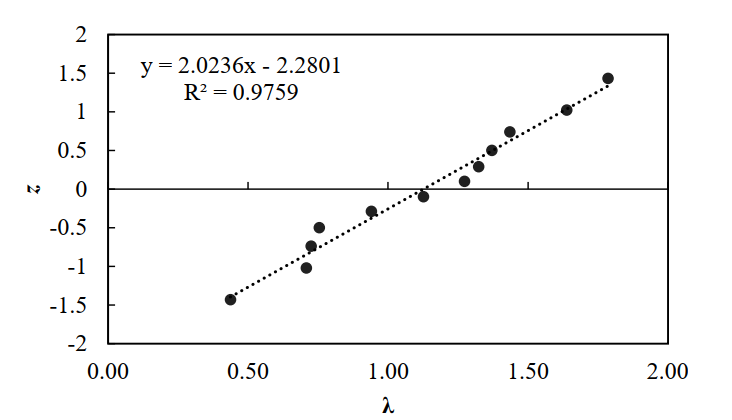
Hình 97 thể hiện biểu đồ phân bố tần suất xuất hiện của λ. Đồ thị xác suất cho giá trị λ thu được dựa trên kết quả của phương pháp Geoservices được trình bày trong Hình 98. Đường cong tuân theo phân bố lognormal.
tường và mố GRS theo phương pháp Geoservices.
dự đoán của tường GRS theo phương pháp Geoservices
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm dữ liệu đo được là tương đối nhỏ về mặt thống kê. Với hạn chế này, có thể nhận thấy rằng giá trị trung bình λ lớn hơn 1 (1.38) cho thấy phương pháp Geoservices là một phương pháp dự đoán không bảo thủ, và chuyển vị ngang dự đoán trung bình chỉ bằng khoảng 72 % chuyển vị ngang đo được thực tế. Giá trị COV khá lớn (1.15) cho thấy độ tin cậy của phương pháp này tương đối thấp.
Phương pháp CTI
Bảng 27 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ bằng 0.59, σ bằng 0.64 và COV bằng 1.08.
1 ft = 0.305 m
1 inch = 25.4 mm
1 psi = 6.89 kPa
N/A = không tính được giá trị.
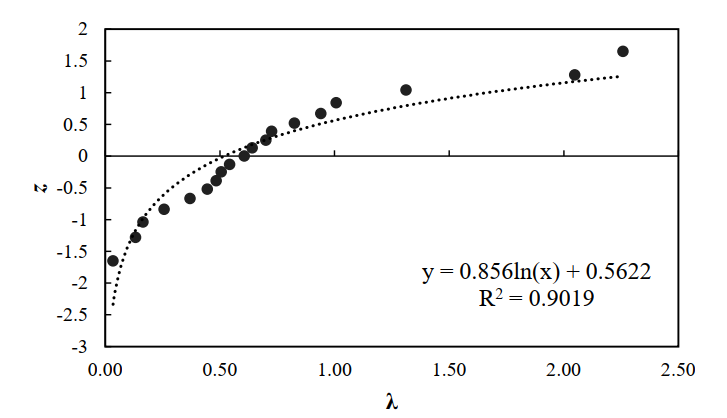
Hình 99 thể hiện biểu đồ phân bố tần suất xuất hiện của λ. Đồ thị xác suất cho giá trị λ thu được dựa trên kết quả của phương pháp CTI được trình bày trong Hình 100. Đường cong tuân theo phân bố lognormal.
chuyển vị ngang của tường và mố GRS theo phương pháp CTI.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm dữ liệu đo được là tương đối nhỏ về mặt thống kê. Với hạn chế này, có thể thấy rằng giá trị trung bình λ nhỏ hơn 1 (0.59) cho thấy phương pháp CTI là một phương pháp dự đoán bảo thủ, và nó đánh giá lớn hơn chuyển vị ngang thực tế khoảng 1.69 lần. Giá trị COV tương đối cao (1.08) cho thấy độ tin cậy của phương pháp này tương đối thấp.
Phương pháp Jewell–Milligan
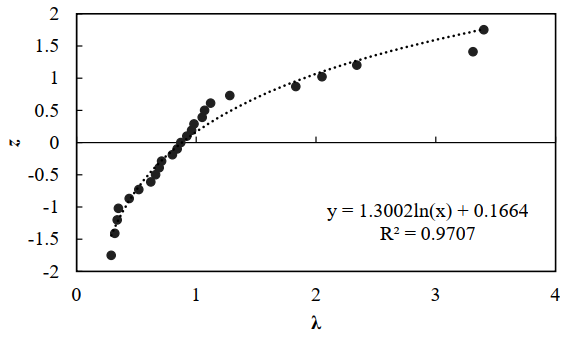
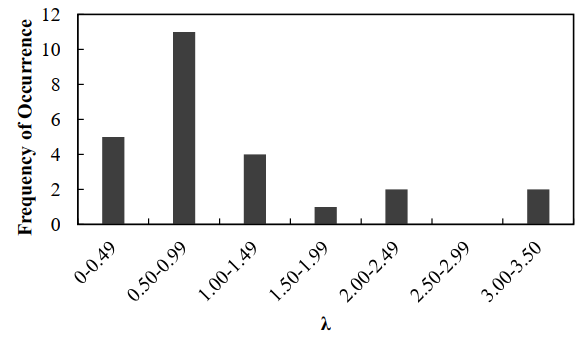
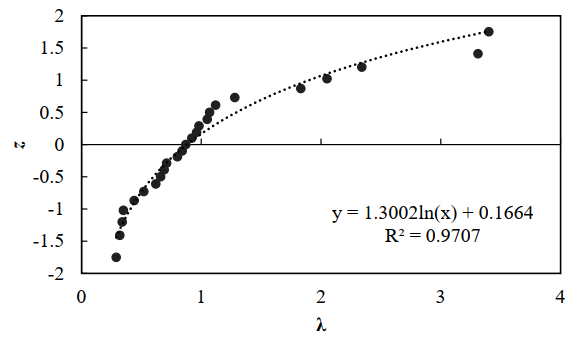
Bảng 28 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ bằng 0.74, σ bằng 0.59 và COV bằng 0.80.
Bảng 28. Chuyển vị ngang dự đoán và đo được của tường và mố GRS theo phương pháp Jewell-Milligan.
1 ft = 0.305 m
1 inch = 25.4 mm
1 psi = 6.89 kPa
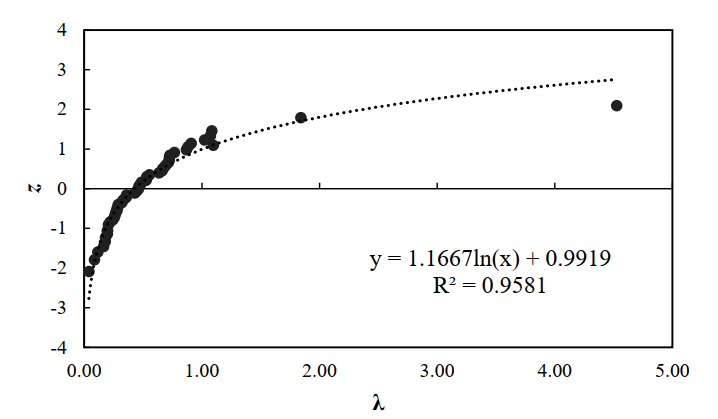
Hình 101 thể hiện biểu đồ phân bố tần suất xuất hiện của λ. Đồ thị xác suất cho giá trị λ thu được dựa trên kết quả của phương pháp Jewell-Milligan được trình bày trong Hình 102. Đường cong tuân theo phân bố lognormal.
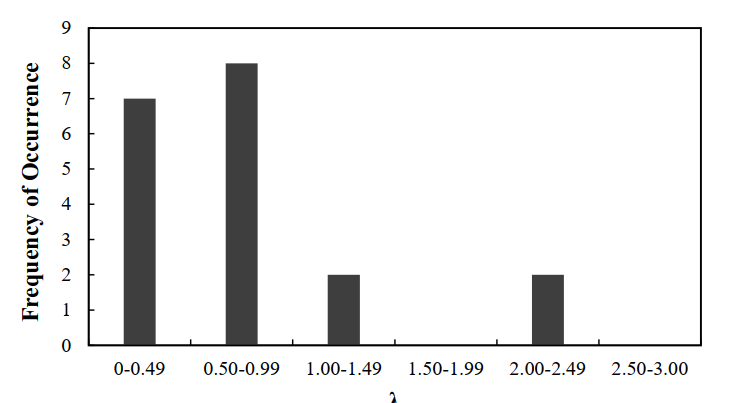
tường và mố GRS theo phương pháp Jewell–Milligan.
tường GRS theo phương pháp Jewell–Milligan.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm dữ liệu đo được là tương đối nhỏ về mặt thống kê. Với hạn chế này, có thể thấy rằng giá trị trung bình λ nhỏ hơn 1 (0.74) cho thấy phương pháp Jewell–Milligan là một phương pháp dự đoán bảo thủ, và nó đánh giá lớn hơn chuyển vị ngang thực tế khoảng 1.35 lần. Giá trị COV tương đối thấp (0.80) cho thấy phương pháp này có độ tin cậy ở mức chấp nhận được.
Phương pháp Wu
Bảng 29 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ bằng 0.24, σ bằng 0.12 và COV bằng 0.50.
Bảng 29. Chuyển vị ngang dự đoán và đo được của tường và mố GRS có mặt chắn dạng khối modular theo phương pháp Wu.
1 ft = 0.305 m
1 inch = 25.4 mm
1 psi = 6.89 kPa
Hình 103 thể hiện biểu đồ phân bố tần suất xuất hiện của λ. Đồ thị xác suất cho giá trị λ thu được dựa trên kết quả của mô hình giải tích được trình bày trong Hình 104. Đường cong tuân theo phân bố lognormal.
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm dữ liệu đo được là tương đối nhỏ về mặt thống kê. Với hạn chế này, có thể thấy rằng giá trị trung bình λ nhỏ hơn 1 (0.24) cho thấy phương pháp Wu là một phương pháp dự đoán bảo thủ, và nó đánh giá lớn hơn chuyển vị ngang thực tế khoảng 4.17 lần. Giá trị COV thấp (0.50) cho thấy phương pháp này có độ tin cậy tốt.
Phương pháp Adams
Bảng 30 liệt kê các giá trị dự đoán và đo được của chuyển vị ngang tường và mố GRS, cùng với λ và z cho từng điểm dữ liệu. Dựa trên các kết quả, giá trị trung bình λ bằng 1.13, σ bằng 0.41 và COV bằng 0.36.
Bảng 30. Chuyển vị ngang dự đoán và đo được của tường và mố GRS theo phương pháp Adams.
1 psi = 6.89 kPa
1 inch = 25.4 mm
Hình 105 thể hiện biểu đồ phân bố tần suất xuất hiện của λ. Đồ thị xác suất chuẩn cho giá trị λ thu được dựa trên kết quả của phương pháp Adams được trình bày trong Hình 106. Đường cong tuân theo phân bố chuẩn.
mố GRS theo phương pháp Adams
Kết luận:
Khi diễn giải các kết quả trong nghiên cứu này cần lưu ý rằng số lượng điểm dữ liệu đo được là tương đối nhỏ về mặt thống kê. Với hạn chế này, có thể thấy rằng giá trị trung bình λ hơi lớn hơn 1 (1.13) cho thấy phương pháp Adams là một phương pháp dự đoán hơi không bảo thủ, và chuyển vị ngang dự đoán trung bình bằng khoảng 88 % chuyển vị ngang đo được thực tế. Giá trị COV nhỏ (0.36) cho thấy phương pháp này có độ tin cậy tốt.
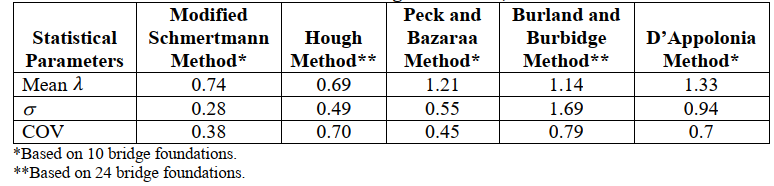
So sánh sáu phương pháp dự đoán chuyển vị ngang của mố và tường GRS
Bảng 31 tổng hợp phân tích thống kê của sáu phương pháp dự đoán chuyển vị ngang của mố và tường GRS. Phương pháp Adams là phương pháp chính xác nhất để dự đoán chuyển vị ngang lớn nhất của tường và mố GRS, với giá trị trung bình λ gần bằng 1 nhất và hệ số biến động COV nhỏ. Phương pháp Jewell–Milligan là một phương pháp dự đoán bảo thủ và tương đối chính xác để dự đoán chuyển vị ngang của tường và mố GRS với độ cứng mặt chắn có thể bỏ qua. Đối với việc dự đoán chuyển vị của tường và mố GRS có khối ốp mặt CMU, cũng có thể sử dụng phương pháp CTI, mặc dù nó có thể đánh giá lớn hơn biến dạng ngang khoảng 1.69 lần và có độ tin cậy tương đối thấp.
Bảng 31. Tóm tắt phân tích thống kê của sáu phương pháp dự đoán chuyển vị ngang của mố và tường GRS.
| Các tham số thống kê | Phương pháp FHWA |
Phương pháp Geoservices |
Phương pháp CTI |
Phương pháp Jewell-Milligan |
Phương pháp Wu |
Phương pháp Adams |
|---|---|---|---|---|---|---|
| Giá trị trung bình λ | 0.12 | 1.38 | 0.59 | 0.74 | 0.24 | 1.13 |
| σ | 0.10 | 1.59 | 0.64 | 0.59 | 0.12 | 0.41 |
| Hệ số biến thiên (COV) | 0.38 | 1.15 | 1.08 | 0.80 | 0.50 | 0.36 |
Hỗ trợ duy trì trang:
Tôi xây dựng trang này để chia sẻ các tài liệu kỹ thuật cốt lõi trong thiết kế hạ tầng giao thông.
Nếu bạn thấy nội dung hữu ích và muốn góp phần duy trì trang hoạt động bền vững, tôi rất trân trọng mọi sự ủng hộ.